





步进电机的无传感器控制
闭环步进电机替代BLDC电机
长期以来,步进电机技术一直被认为是经济实惠的替代方案,可替代不需要伺服电机提供高性能的应用。由于它们具有吸引力的生产价格和相对较高的扭矩/尺寸比,它们继续用于设备工程中。但是,对于机械工程中的辅助轴,伺服系统开始受到重视。尽管由于对斜坡进行繁琐的测试以避免共振带以及由于缺乏反馈而使尺寸更加复杂,但伺服器的采购成本通常更高,但它们更易于调试,这对于有限的批量生产更具吸引力。
近年来,由于开发了磁场定向的闭环控制步进电机,这种趋势已被制止甚至逆转。闭环技术的核心是功率调整的电流控制和控制信号反馈。这些步进电机的控制方式与伺服电机完全相同:使用编码器的信号检测转子位置,并在电机绕组中产生正弦相电流。磁场的矢量控制可确保定子的磁场始终垂直于转子的磁场,并且磁场强度精确地对应于所需的转矩。因此,闭环步进电机基本上只不过是高极无刷直流伺服电机(BLDC)。传统上与步进电机技术相关的所有缺点,例如共振和过多的热量产生,不再是问题。取而代之的是,我们现在拥有一个系统,该系统在额定速度的20%至50%时,可以连续获得的扭矩是相同尺寸的伺服电机的2至3倍。
结合步进电机系统更优惠的价格,闭环步进电机是伺服系统的经济替代品。然而,在传统的步进电机应用中,例如在实验室自动化或小型CNC铣床中,闭环系统并不总是能成功取代开环系统。尽管闭环技术在这里确实也提供了优势,但是编码器的高昂成本通常远远超过小型电动机的成本,这通常阻碍了该技术在这些应用中的广泛使用。此外,在这些应用中,不带编码器的步进电机的定位精度通常就足够了。
虚拟编码器代替真实编码器
为了在这些应用中受益于磁场定向控制的优势,Nanotec为步进电机开发了一种无传感器(即无编码器)控制的步进电机,其中转子的实际位置和速度由控制器中的“虚拟编码器”确定。
无传感器系统已在BLDC电机中使用了很多年,尤其是在不需要位置控制的风扇和泵中。所有无传感器系统都利用物理效应,即电动机在运行期间会感应出与速度成比例的反电压(反电动势)。
最简单的无传感器控制是在换向周期中使线圈断电时直接测量反电动势。但是,与标准驱动相比,该方法需要特殊的硬件,并且只能稳定在大约50℃。电机额定速度的10–20%,低于该速度时测量信号太小。因此,要求苛刻的应用程序现在依赖于使用“观察者”的系统,这些系统无法从当前控制器测量的其他值中重建无法直接测量的值,例如速度或反电动势。这种类型的系统的核心是精确的电动机模型,与真实电动机并联,可以从已知的输入值(例如设置的PWM)中计算出值(例如绕组中的电流)。这些计算值也将被测量。然后在每个循环中将计算得出的值与测量值进行比较。由于以此方式确定的观察误差,将永久调整电机模型的内部值。因此,可以针对未实际测量的值(例如速度)获得正确的估计值。尽管这种方法之所以有效,是因为绕组的电抗由于感应电压而随速度而变化,但是即使在小速度下也可以很容易地测量直接测量的值。结果是一个“虚拟编码器”,该虚拟编码器以一定的最小速度开始传递位置和速度信息,其精度与实际的光学或磁性编码器相同。电机模型的内部值是永久调整的。因此,可以针对未实际测量的值(例如速度)获得正确的估计值。尽管这种方法之所以有效,是因为绕组的电抗由于感应电压而随速度而变化,但是即使在小速度下也可以很容易地测量直接测量的值。结果是一个“虚拟编码器”,该虚拟编码器以一定的最小速度开始传递位置和速度信息,其精度与实际的光学或磁性编码器相同。电机模型的内部值是永久调整的。因此,可以针对未实际测量的值(例如速度)获得正确的估计值。尽管这种方法之所以有效,是因为绕组的电抗由于感应电压而随速度而变化,但是即使在小速度下也可以很容易地测量直接测量的值。结果是一个“虚拟编码器”,该虚拟编码器以一定的最小速度开始传递位置和速度信息,其精度与实际的光学或磁性编码器相同。尽管这种方法之所以有效,是因为绕组的电抗由于感应电压而随速度而变化,但是即使在小速度下也可以很容易地测量直接测量的值。结果是一个“虚拟编码器”,该虚拟编码器以一定的最小速度开始传递位置和速度信息,其精度与实际的光学或磁性编码器相同。尽管这种方法之所以有效,是因为绕组的电抗由于感应电压而随速度而变化,但是即使在小速度下也可以很容易地测量直接测量的值。结果是一个“虚拟编码器”,该虚拟编码器以一定的最小速度开始传递位置和速度信息,其精度与实际的光学或磁性编码器相同。
Nanotec的所有即插即用电机均实现了磁场定向控制(闭环)。BLDC和步进电机根据负载情况在磁场方向上进行控制,并且仅因极数不同而导致的工作点有所不同。因此,这两种电机类型的行为都类似于直流伺服。控制所需的转子位置或视场角可以使用旋转编码器或无传感器方法来确定,如下所述。
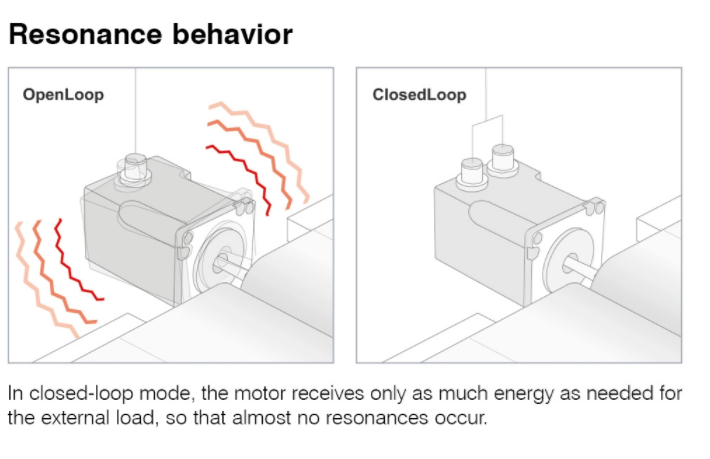
无步进损耗,无谐振
基于观测器的控制器的质量的一个关键因素是所用电动机的良好模型,无论是数学公式还是所连接电动机的电动机常数。
因此,当前的任务是找到一个足够精确的电动机数学模型,即使在小型微处理器中,也可以在每个控制周期中对其进行完全计算。原则上,步进电动机在数学上与BLDC电动机相似,但仅具有两相而不是BLDC的通常三相,并且由于极数较多,因此在较高速度下模型中也显示一些特殊功能。
关于无传感器控制器的实际使用的另一个重要方面是模型参数的识别。BLDC控制器经常需要大量与电机有关的参数,这些参数通常在数据表中未指定,但需要付出很大的努力才能确定。这也适用于不执行“真正的”无传感器控制而仅具有阻塞检测机制或简化的控制的系统,该系统会根据负载降低电动机的额定电流。即使在这些情况下,也必须识别并配置与电机有关的阈值。
相比之下,Nanotec的无传感器系统仅需很少的参数就可以运行,而用户实际上并不需要知道这些参数:自动设置例程会测量连接的电机并自动确定所有必需的参数。
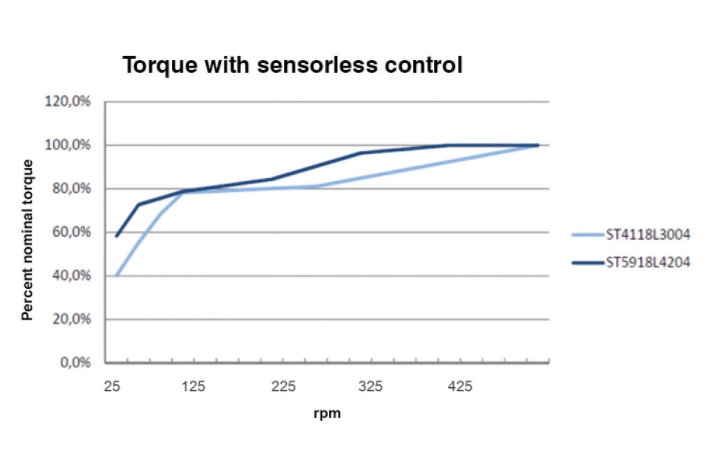
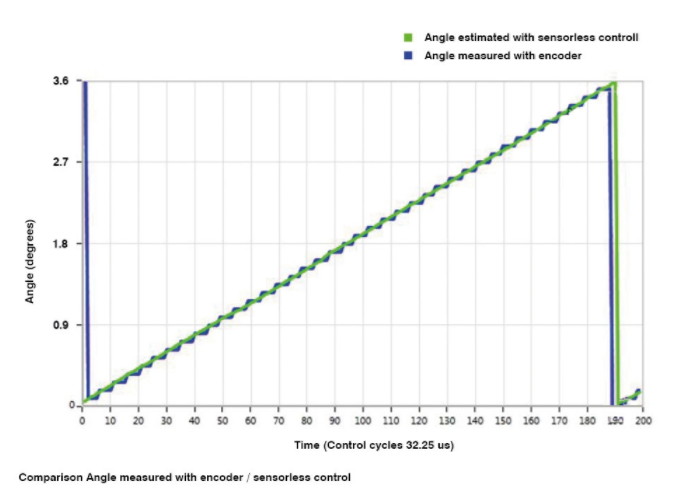
根据电动机的类型,可以在100到250 rpm之间获得速度和位置信息。该信息与增量为500或1000的光学编码器一样精确。最终的电机控制与通过编码器控制的电机具有相同的质量和扭矩。甚至低于此阈值,无传感器控制仍会降低到大约。10–25 rpm。但是,其精度会随速度而降低,并且可获得的转矩也会下降。
相反,在高速情况下,无传感器系统实际上比旋转编码器工作得更好,旋转编码器始终表现出跳动公差,导致正弦角度误差。在没有自带轴承的标准编码器中,此误差可达到±1°,这会导致在闭环模式下以较高的速度产生振动。另一方面,在虚拟编码器中,高速时的误差与电动机的步距角误差(±0.09°)处于同一数量级。此外,编码器始终提供数字的离散位置值。特别是在低分辨率下,这会导致电动机的同步波动。相反,虚拟编码器值是连续且恒定的。
基于观察者的控制无需使用具有很高反电动势的电机,但它具有高电感的缺点,因此动态性能较差。相反:具有极低电感和低电阻的电动机(因此具有高额定电流)的工作性能要好得多。
开环和闭环相结合
无传感器控制特别适合步进电机,因为它不仅可用于速度应用,而且与开环控制结合使用时还可用于定位。无传感器算法能够检测当前估计速度的准确性。如果信号随着速度降低而变得太不精确,则系统会自动切换到开环模式,继续进行定位。由于在开环模式下通常只有几步以低速运行,因此在这里共振不是问题。从静止状态重新启动时,只需几度即可返回到闭环模式。因此,在几乎所有传统的步进电机应用中,无传感器技术都可以受益于磁场定向控制的优势。
TAG 步进电机无传感器控制
