闭环技术
具有闭环功能的步进电动机融合了步进电动机和伺服电动机技术的优势。与步进电机相比,它们运行更平稳且共振更低,可提供位置反馈和控制,建立时间短,并且完全没有步进损失。如果需要节能,安静运行和高负载公差,它们可以替代步进电机。与伺服电机相比,它们具有优势,因为它们在低速时具有高扭矩,稳定时间短,无后摆的正确定位以及通常尺寸较小的较低价格。
闭环方法也称为正弦换向,通过带有磁场定向控制的编码器实现。闭环技术的核心是性能可调的电流控制以及控制信号的反馈。使用编码器信号记录转子方向,并在电动机绕组中产生正弦相电流。磁场的矢量控制可确保定子的磁场始终垂直于转子的磁场,并且磁场强度精确地对应于所需的转矩。绕组中控制的电流提供了均匀的电动机力,并导致可以特别调节的特别平稳运行的电动机。
真/伪闭环
有一些步进电机装扮成闭环并可以与编码器一起工作,但是不提供任何带有正弦换向电流控制的磁场定向控制。他们仅检查台阶位置,而不能在操作过程中校正台阶角度误差。带有磁场定向控制的真正闭环可补偿运行过程中的步进角误差,并在一整步内校正负载角误差。
与标准步进电机相比的优势
(单击图形以开始动画)
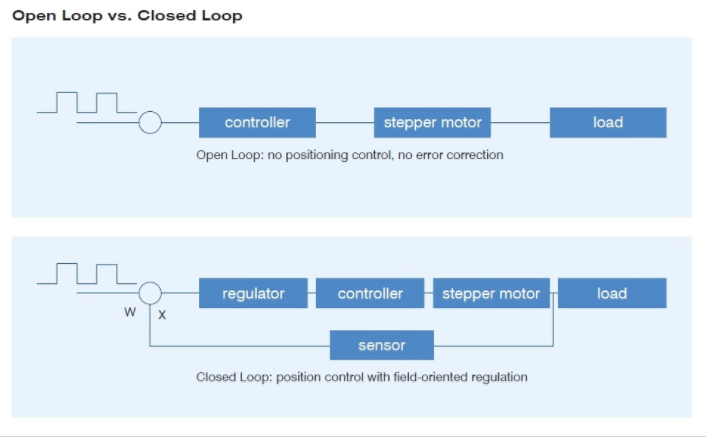
经典的步进电机是可靠,经济的驱动器,可用于固定位置行驶。它们以时钟方向模式(也称为开环模式)运行,该模式包含一个不反馈控制信号的开环控制环路。因此,位置反馈的缺乏是一个局限,因为不能检测到例如由于过载导致的步距偏移或步距损失。此外,较低的频率会引起更多的共振行为,并且较小的负载增加或转矩峰值将导致电动机失步,失步甚至完全停止。
闭环步进电机是经典步进电机技术的先进发展。它们消除了传统步进电机的局限性和缺点:
不需要计算或购买安全储备(通常不超过50%)
负载波动时效率更高,过载时不停机
通过智能电流控制实现节能运行
几乎无共振
由于较少的热量和振动,轴承的使用寿命更长
缩短了加速时间,因为即使在高转速下也能获得高扭矩
通过监控和校正实现精确定位
优于伺服电机
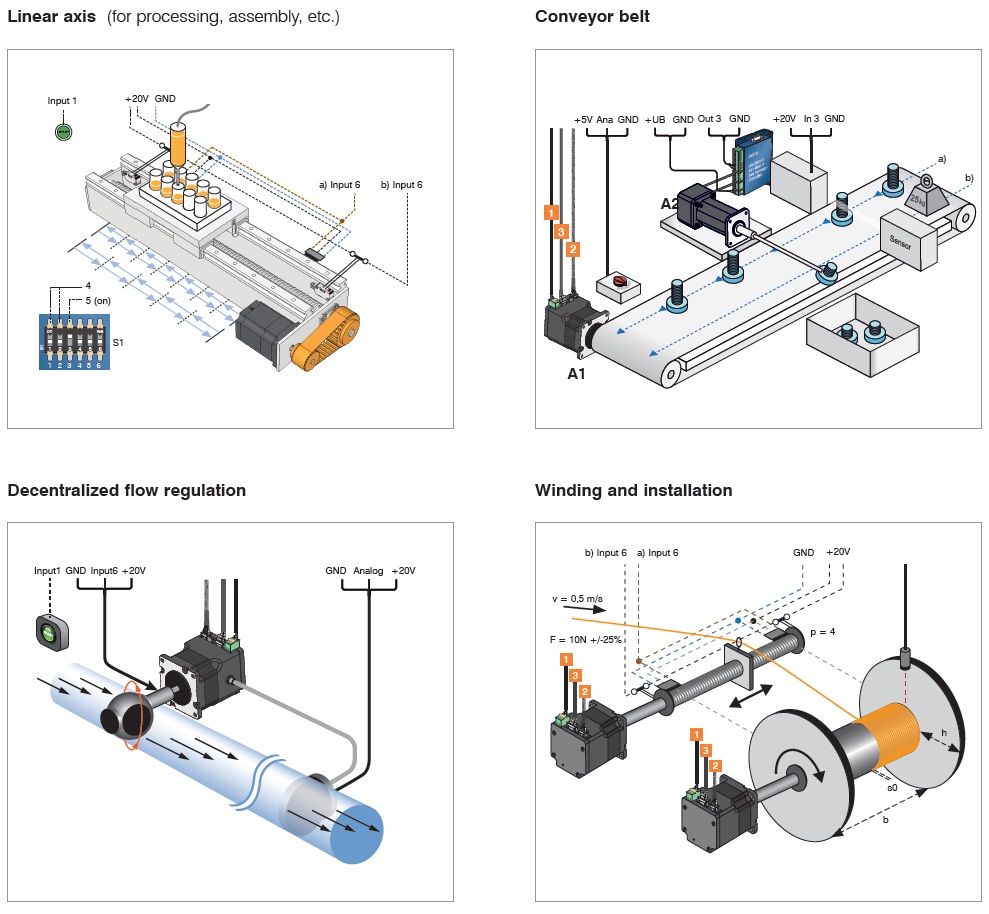
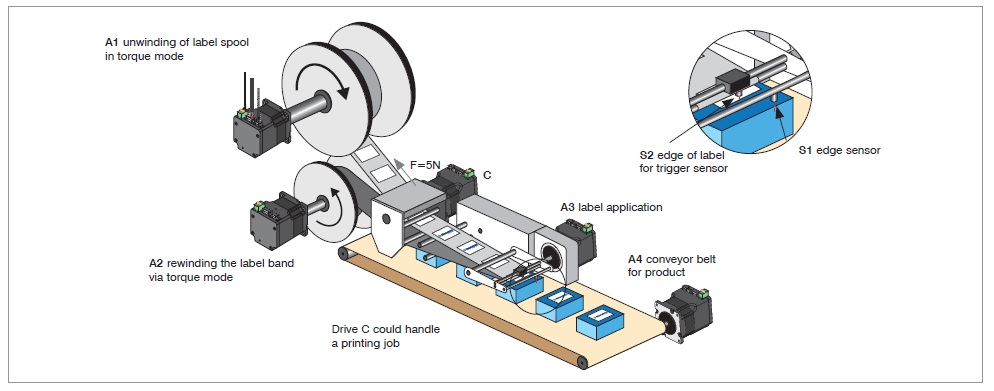
Nanotec的闭环步进电机在许多情况下是伺服驱动器的替代产品,例如在卷绕应用或传送带驱动器中。不仅可以更精确地控制转速和位置,还可以控制转矩(在转矩模式下,如绕组应用中通常所要求的)。闭环步进电机结合了两个方面的优势。它们实现了最高的最大转矩,最佳的效率和最佳的动态特性,而且具有最低的转矩脉动和异常安静的运行。
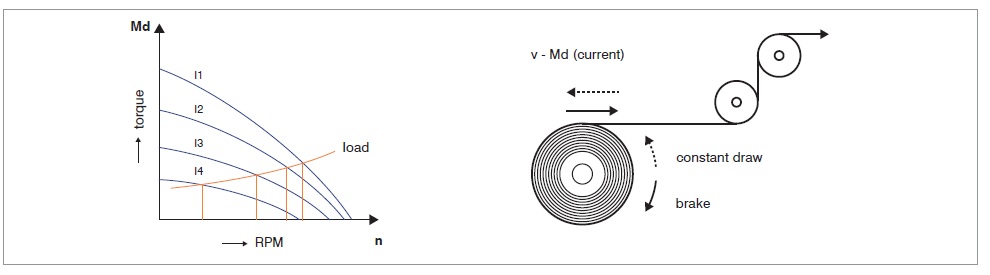
在转矩模式下,闭环步进电机的功能类似于弹簧,因此可以通过电位计设置弹簧张力特性曲线。因此,即使电动机在静止状态下抵消了力,电动机也会传递稳定的力。当力下降时,电动机开始与下降力成比例地旋转,直至达到设定的电流和转矩值。因此,闭环步进电机被证明是任何类型的卷绕,拉伸和冲压应用的理想选择。
当应用需要以下条件时,具有闭环功能的步进电机是替代方案:
转速高达500 rpm时具有高扭矩,并且是一种无需变速箱的紧凑型经济解决方案,
快速调试,无需昂贵的调整,
静止时要保持在适当位置的负载,
避免伺服电机常见的瞬态和自由振荡行为(波动),尤其是在可变负载和脉动时发生,从而导致无法忍受的跟随误差。负载突然变化时,伺服电机会错位,必须纠正。
闭环步进电机的理想应用领域:
多轴应用(串行,以太网,EtherCAT,CANopen)
通过负载变化定位任务
绕组应用
皮带传动(启动/停止,定位)
计量泵,灌装系统
半导体安装
晶圆生产
纺织机/工业缝纫机
机器人技术
测试和检查系统
需要平稳运行,短建立时间和精确定位的应用