





步进电机驱动器信息
步进电机驱动器是用于为步进电机供电和控制的设备。尽管某些基本驱动器仅提供电源,但许多市售驱动器也将控制器电子设备集成到一个完整的包装中。这些电子设备包括逻辑定序器,开关组件和确定步进速率的时钟脉冲源。
驱动器类型
步进电动机驱动器的主要特点是具有三个独立的属性:电动机绕组布置,驱动电路和步进模式。驱动器的类型对步进电机系统的整体性能有很大影响,特别是其扭矩,输出功率和速度。区分不同类型对于确定最适合该应用程序的驱动程序很重要。
绕组布置
在两相步进电动机中,有两种基本的绕组布置。步进电机驱动器可根据其设计用途进行分类。
驱动模式线数(引线)主要特点
单极5、6或8低成本,坚固,简单,低速运行最佳
双极系列4、6或8低速时高扭矩,高速时低扭矩
双极并联4或8扭矩-速度曲线更平顺,高速时扭矩更高
单极驱动器专为单极电动机而设计,单极电动机是具有6引线(中心抽头线圈)的电动机。驱动器无需在每一相中使电流反向,而只需在每一相中将电流从一个线圈切换到另一线圈。由于绕组的配置,这种切换使电动机中的磁场反向。单极电机驱动模式更易于操作且成本更低,但由于在任何给定时间仅使用一半绕组,因此与同等双极电机相比,转矩降低了约30%。单极电动机最适合用于低速应用。
双极驱动器专为双极电动机而设计,双极电动机是具有四根引线的电动机。驱动器/控制器中的电子设备交替改变每个相中的电流以驱动转子。双极电动机产生的转矩比单极电动机更大。但是,该机制稍微复杂一些,从而使电子设备更加复杂,有时价格更高。在双极结构中,电动机可以并联或串联接线。串联接线可在低速时提供更高的转矩,而并联可在高速时产生高转矩。
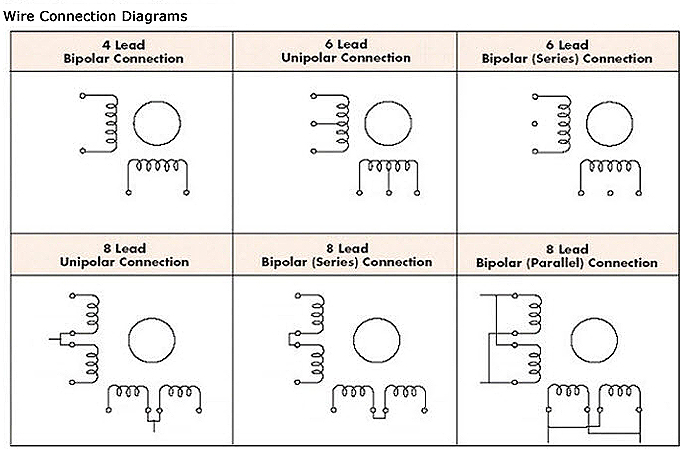
双极和单极布置的电线连接图”来源:Osmtech
驱动电路
步进电机的性能也非常取决于驱动电路,该驱动电路可以配置为恒定电压或恒定电流。
L / R驱动电路称为恒压驱动器,因为对每个绕组施加正电压或负电压以设置步进位置。L / R代表电感(L)与电阻(R)的电气关系,它描述了L / R电路电机中电流的变化率。电机线圈阻抗与步进率的关系也由这些参数确定。L / R驱动电路可以配置为运行双极和单极步进电机。电子设备也比斩波器驱动电路中的电子设备更简单,更便宜。
选择提示: L / R驱动器应使电源输出电压与电动机线圈的额定电压“匹配”,以进行连续工作。大多数发布的电动机性能曲线均基于施加在电动机引线上的满额额定电压。电源输出电压电平必须设置得足够高,以考虑驱动电路内的电滴,以实现最佳的连续运行。
斩波器驱动电路是恒流驱动器,因为它们在每个绕组中产生相对恒定的电流。斩波器的名字源于快速打开和关闭输出电压(斩波)以控制电动机电流的技术。对于此设置,低阻抗电动机线圈和可用的最大电压电源可提供最佳性能。斩波器驱动电路几乎仅用于双极电机。与L / R驱动器相比,斩波器驱动器允许步进电机在较高速度下保持更大的扭矩或力,尽管具有用于感测和切换控制的附加电子设备。
选择提示:通常,为了获得最佳性能,建议电源电压与电机额定电压之间的比率至少应为八比一。
步进模式

步进电机的“步进模式”包括全步,半步和微步。步进模式是步进电机输出转矩及其分辨率(电机轴每脉冲旋转度数)的决定因素。某些步进电机驱动器可能具有半步和全步之间的开关可选步模式。微步进驱动器可以提供开关可选择的分辨率或软件可选择的分辨率。
全步进步进电机以实际的磁性“定位”位置为增量移动,这意味着没有电子或控制分辨率提高。在全步模式下,来自驱动器的一个数字脉冲基本上等于一个步。通常是通过交替给两个绕组通电同时使电流反向来实现的。全步模式的电动机将产生其全额定转矩。
在半步驱动/控制中,一个绕组通电,然后两个绕组交替通电,使转子旋转一半的距离。通过这种方式,驱动过程中的角分辨率增加了一倍,并且在断电时电动机将前进到下一个磁性位置。尽管半步模式提供的扭矩减少了大约30%,但在高分辨率下比全步模式产生的运动更平稳。半步进的另一个优点是驱动电子设备无需更改即可支持它。
Microstep是一种相对较新的步进电机步进模式,已集成到许多双极电机中。该模式以电子方式控制电动机绕组中的电流,以进一步细分两极之间的位置数量,随后将整步分为几个小步。与半步模式一样,微步提供的扭矩比全步模式少大约30%。而且,每个微步中的非累积误差百分比略大于一个完整步中的误差。微步进通常用于需要在广泛的速度范围内进行精确定位和平稳运动的应用中。
电源要求
在选择过程中考虑步进电机驱动器的功率要求也很重要。最重要的规格是:
供电电压 -驱动器或控制器将要运行的输入电压范围,以交流伏特或直流伏特表示。
输入相 -交流输入相,单相或三相。单相是更常用的交流电类型,通常但不仅限于低压应用。三相输入通常用于高压电源。
输入频率 -交流输入频率,以Hz表示。
连续输出电流 -通过驱动器的工作电流或预期电流,以安培表示。
峰值输出电流 -驱动器在很短的时间内输出电流的能力。
运行参数
在选择步进电机驱动器时,有许多操作参数是重要的次要考虑因素。
考虑驱动器的设置和控制。这包括如何配置和存储程序和信息(磁盘,PMCIA插槽,计算机接口等),以及如何操作驱动器(手动,操纵杆,手持控制器,控制面板等)。
该反馈机制和反馈模式也应考虑在内。该机构是检测和测量电动机中位置的手段。机械类型包括霍尔效应传感器,旋转变压器,增量或绝对编码器,模拟位置传感器和转速表。该模式定义了控制器将信息传送到并处理的方式。反馈模式包括数字反馈,模拟反馈,电流模式,电压模式和速度模式。
为了防止电机运行期间过热,电源的工作温度范围也很重要。
通讯
选择步进电机驱动器时,考虑与系统中使用的计算机总线或体系结构的兼容性也很重要。步进电机系统的一些更常见的通信标准是以太网,RS232,RS485,TTL和USB。
TAG 步进电机驱动器信息
