





伺服电机控制方式及主信号设定方法
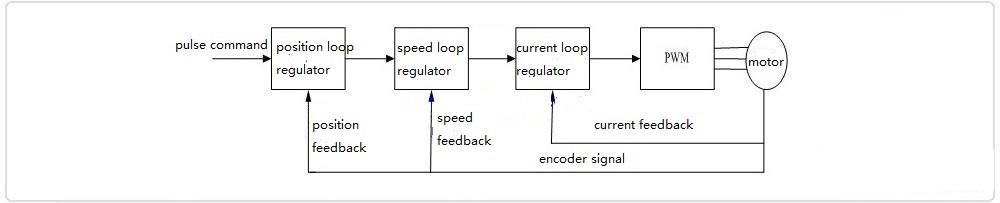
一,伺服系统的三种模式
1.位置控制模式:通常用于某些角度定位或长度固定的长度控制场合,例如木工锯的长度。在位置模式下,伺服接收的脉冲与伺服电机 的旋转角度是一一对应的,因此只要主机发送一定数量的脉冲,伺服电机就可以旋转一定的圈数或角度,并且可以将通过传输机构传输的位置量 更改为相应的长度。实际上,此位置模式是通过使用伺服器内部的位置环功能来实现的,因为带编码器的伺服电机也是闭环 功能,通常只有P的增益量。
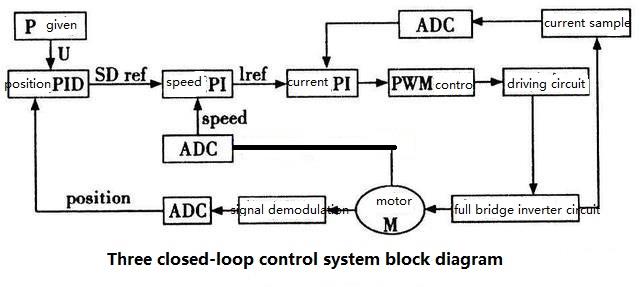
2.速度控制模式:速度环是位置环的内环,位置环的偏差可用作速度环的给定值。它还使用电动机的编码器来实现速度的闭环。速度 环控制目标是伺服电动机的速度。从这个角度来看,如果仅使用速度模式,则伺服电机和矢量变频器的控制没有太大区别,可以使用主站发送的 模拟量来实现速度调节,当然也可以进行控制。通过脉冲的频率。
3.转矩控制模式:转矩控制模式实际上是在控制电动机的电流。转矩回路是速度回路的内部回路。通常,在需要精确控制转矩的某些情况下采用此模式。
例如,某些绕组和张力控制链可以使速度环饱和,并通过电流限制模式实现转矩控制。
二,主机信号给定模式
1.给定的模拟物
这是更常见的。在位置模式下,位置环放置在IPC板内部或CNC内。通过增益放大位置环偏差后,将0-10VDC模拟量输出到 给定端口的伺服驱动器 ,在这种情况下,伺服系统实际上在速度模式下工作,而整个系统在位置模式下工作。
在速度模式和转矩模式下,主机可以在相应模式下工作,只要它向伺服驱动器的给定端口提供0-10VDC。
2.脉冲给定
上位机发出具有相同占空比的方波脉冲。如果伺服器本身在位置模式下工作,则它可以根据脉冲数完成一定的旋转角度。如果伺服器本身以速度 模式工作,它将根据主机以一定速度发送的连续脉冲旋转。
3,沟通给予
有些总线或以太网方法,一般在多轴联动的情况下,多个伺服需要同步控制,通过SERCOS总线的方法,可以实现多个伺服电机的同步 控制,通讯的主要优点是接线相对较小,有些是在软件中完成的,因此灵活到位,修改非常方便,并且接线少,因此可靠性高。
TAG 伺服电机
