





伺服电机如何计算工件移动距离?
文章来源:锐特步进电机 时间:2019-11-28 09:55:36 浏览:
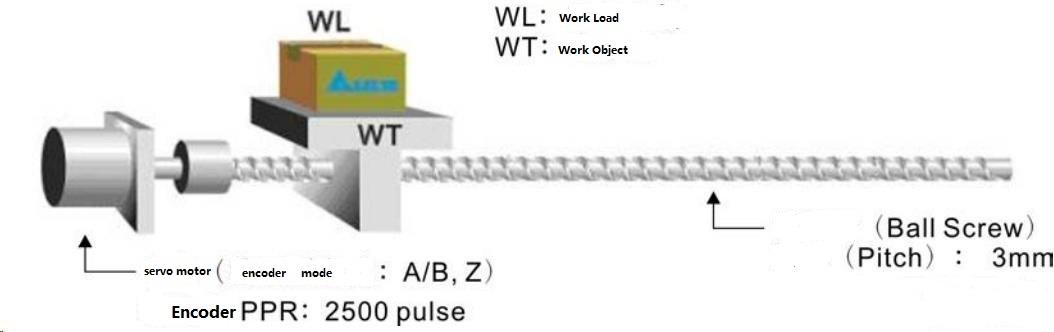
如下图所示,伺服电机驱动螺杆旋转并移动工件。我们知道,与普通电动机相比,伺服电动机具有精确的定位和快速响应的优点,并且被用于 更高的位置。然后如何定位,整个伺服驱动系统是一个闭环反馈系统,伺服电机的末端有一个编码器,它将始终将电机旋转的数据传输到 伺服驱动器,以确保电机达到指定位置。
上例显示了如何计算工件的行进距离。伺服电机以脉冲+方向的形式驱动。为了便于计算,例如,在给驱动配备电子齿轮比后,工件的移动量为1 um / pulse。发送一个脉冲使工件移动1um,发送1000个距离为1mm。工件的移动速度由脉冲频率决定,假设脉冲频率 为500pulse / s,则工件的移动速度为0.5mm / s。在知道速度的情况下,通过将速度乘以时间,可以计算出伺服电机驱动工件在特定时间内行进的距离。这里应该注意的是,发送脉冲的命令一般具有加减速作用,整个运动过程并不统一。除非取消加减速功能,否则随时间计算距离是不准确的。
实际上,不需要计算伺服电机的位置。编码器不断测量电动机的旋转。我们只需要收集编码后的数据即可知道工件的位置,或者也可以检查 控制器上的脉冲数。
很简单,任何伺服驱动器都有参数来监视电动机的实际位置。以深圳锐特伺服驱动器为例。DP-CPO是命令脉冲的低5位; DP-CPO。是命令脉冲高5位。
(在数码管上显示的位数为5)。如果初始位置为0,则在位置之后,DP-CPO为2000,DP-CPO为2000。为0010。如果将交流伺服控制器的电子齿轮比设置为10/1,即1000个脉冲中的一个脉冲,则实际位置为102000 。转换是电动机走了102000/1000 = 102圈。
TAG 伺服电机
