





步进电机反相励磁制动原理
文章来源:锐特步进电机 时间:2019-11-27 15:38:23 浏览:
反向制动如下图所示。步进电机的定位点在B相,即最后一个停止位置在B相。由于转子仍被A相励磁,因此A相必须处于OFF状态,B相励磁才能使转子运行从A相稳定点到B相稳定点。随着该操作的进行,转子将超过B相的平衡点,并在平衡点处来回振荡直至稳定。
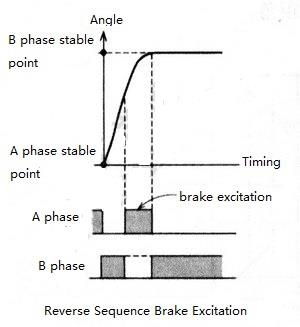
另一方面,当转子从A相运转到B相时,B相的绕组被励磁为截止。在B相稳定的某个时刻,A相励磁消耗A相制动器的转子动能,然后使B相励磁并停止在B相稳定点。因此,如上图所示,没有过冲的转子逐渐停止。此时,制动励磁电流开始的时刻和制动时间会极大地影响制动效果。因此,为了获得制动效果,必须反馈转子的速度或位置信号以进行闭环控制,以确定何时使制动器反向励磁。
TAG
