





步进电机的保持转矩特性
当步进电机的线圈通过直流电时,负载转子的电磁转矩(通过平衡负载转矩而产生的恢复电磁转矩称为静转矩或静转矩)与转子功率角之间的关系称为仍然。转矩特性,这是电动机的静态特性。如下所示:
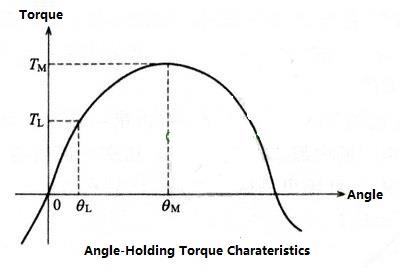
由于转子是永磁体,并且所产生的气隙磁密度为正弦曲线,因此理论上的静态转矩曲线为正弦波。该角度平稳转矩特性是步进电动机产生电磁转矩的能力的重要指标。最大转矩越大越好,转矩波形越接近正弦曲线越好。实际上,磁极下方存在齿槽转矩,这会导致组合转矩失真。例如,两相电动机的齿槽转矩是静转矩角周期的4倍谐波,并被加到正弦静转矩上。显示的扭矩为:
TL = TMsin [(θL/θM)n / 2]
其中,TL和TM分别代表负载转矩和最大静态转矩(或保持转矩),对应的动力角为θL和θM,位移角的变化决定了步进电机的位置精度。根据以上公式:
θL=(2θM/ n)弧菌(TL / TM)
在上一课中介绍了永磁永磁步进电动机和HB混合式步进电动机的步进角θs:θs= 180°/ PNr,并将该角度更改为机械角(弧度),然后变为以下公式:
Θs= n /(2Nr)
上式Nr是转子齿数或极对数,因此两相电动机θM=θs。
负载转矩是电磁转矩的负载(例如弹簧力或重物的举升力等),如果电动机正反方向运动,将产生2θL的角度偏差。为了提高位置精度,θL较小,因此,基于θL=(2θM/ n)arcsin(TL / TM),应选择最大静转矩Tm,步距角θs小的步进电动机。是一种高分辨率电机。根据等式θs= n /(2Nr),θs越小,Nr越大。
另外,高分辨率步进电动机的转子结构大致分为三种类型:PM型,VR型和HB型,并且HB型分辨率最佳。
由于PM型定子磁铁和爪形结构之间的关系,定子极数的增加受到机加工的限制。HB型转子的表面没有齿,并且N极和S极在转子的表面交替磁化。因此,极数是极对数Nr。类似地,转子极Nr的增加也受到磁化机构的限制。当VR型转子的齿数与HB型的齿数相同时,由于不使用永磁体,而使用相同的Nr,但是步距角θs是HB型的两倍,并且由于没有永磁体磁极时,最大扭矩Tm小于HB型。
当两相步进电动机的外径约为42 mm时,Nr = 100齿,阶跃角为0.9°,这是实际使用中的最高分辨率。随着Nr变大和电抗增加,转矩将在高速下减小。因此,Nr = 50且步距角为1.8的电动机被广泛使用。对于HB型结构,全步态的步角精度为3%,步进电机的运行角θ=nθs,每个操作步骤均无累积误差,并且电机的速度足以增大n(θs小))以提高位置定位精度。
TAG 步进电机厂家
