





伺服电机精确定位和闭环特性
文章来源:锐特步进电机 时间:2019-11-27 15:12:56 浏览:
伺服机构是一种自动控制系统,使物体的输出控制量能够跟随输入目标(或给定值)的任意变化。
接下来,我们将探讨如何实现伺服电机的精确定位,如何理解其闭环特性。首先,让我们看一下由伺服驱动器和伺服电机组成的交流伺服系统的组成。这里我们主要讲一下伺服驱动器的工作原理,电机只是一个执行器。驱动程序的原理图如下。类似于逆变器的主电路,对电源进行整流和逆变以实现从AC→DC→AC的转换。
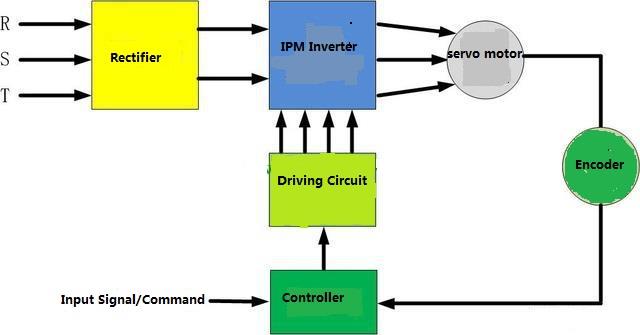
伺服驱动器结构图
输入信号/命令可以是与伺服电动机的三种控制模式相对应的控制信号,例如位置,速度和转矩。每个控制模式对应于环的控制。转矩控制是当前的闭环控制,速度模式是速度的闭环控制。该模式是三个闭环控制模式(转矩,速度,位置)。下面我们分析位置模式的三个闭环:

位置模式的三闭环控制
在上图中,M代表伺服电机,PG代表编码器,最外面的蓝色代表位置环。因为我们最终控制了位置(定位),所以内环分别是速度环和电流环(扭矩环)。低速回路和电流回路充当保护环,以防止失速控制和过载,以确保恒定的电动机速度和恒定的电动机电流。我们专注于位置环如何确保电机可以精确旋转给定角度。
如果给一个脉冲,反馈脉冲为0,脉冲偏差Δp= 1,输入到控制器,此时驱动电路控制IPM变频器产生SPWM波来驱动伺服电机旋转,注意这个SPWM波。它不同于我们的plc脉冲的方波。电机驱动编码器旋转时,它会发送一个反馈脉冲。此时,△p = 0,电机停止输出,定位一个脉冲。从脉冲到接收反馈脉冲的整个过程都是闭环过程,以确保可以精确定位电动机。脉冲数决定了定位距离。脉冲的频率决定了电动机的速度。
TAG 伺服电机
