





闭环步进控制的形式
步进电机因其价格便宜,易于操作且在低速下具有高扭矩而被广泛应用于整个工程领域。但是,步进电动机具有诸如失步,高速下的转矩降低,共振和高功耗等缺点。为了缓解这些问题,我们提供了三种方法来闭合步进电机周围的环路:终点校正,闭环微步进以及将步进电机作为两相无刷电机进行驱动。
步进电机基础
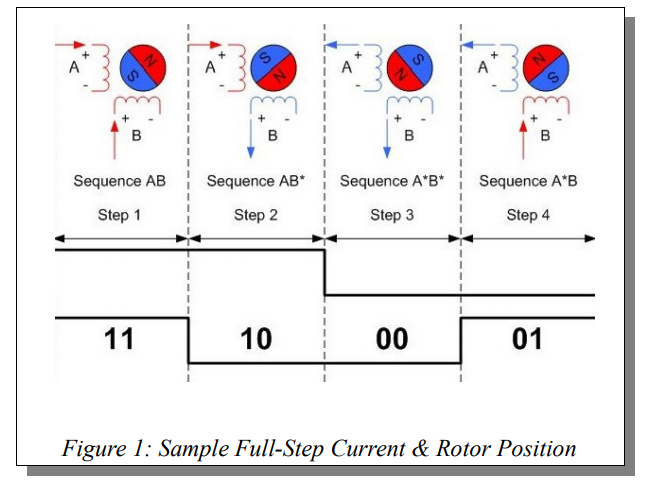
步进电动机具有围绕齿轮形转子排列的多个“带齿”电磁体。为了使电动机轴转动,这些电磁体按特定顺序通电。图1显示了两相步进电机的此过程的简化视图。每个特定的顺序对应于电机的一个步骤。步进电机通常每转具有200步。
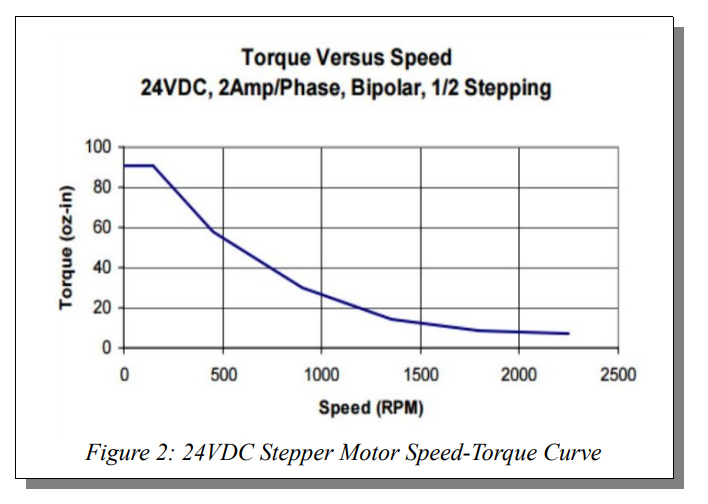
步进电机并非没有缺点。步进电机的第一个缺点是它始终在全电流下运行。这导致能量浪费和过多的热量产生。其次,步进电动机运行的根本原因是当它们以不连续的步进改变其位置时所引起的振动。当步进频率与步进电机的固有振动或谐振频率匹配时,这些振动的幅度将增加,从而导致位置丢失。随着电动机速度的增加,步进电动机的转矩也会显着降低。常见的速度-转矩曲线显示在“错误:找不到参考源”中。最后,位置分辨率受每转步数的限制。如果需要提高分辨率,则可以通过微步进过程来驱动步进器。
微步进
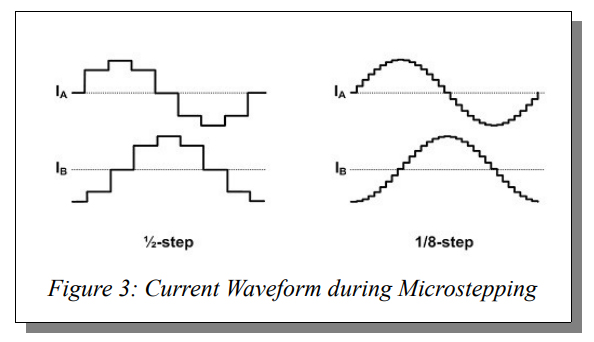
微步进是一种驱动步进电机的方法,可将电机的每个整步细分为较小的增量,称为微步。微步进通常每整步产生2到256个微步,这意味着每转200步电动机现在每转最多可具有51200个这些微步。图3详细说明了每个步进电机相中的电流波形,其中每整步微步数增加。
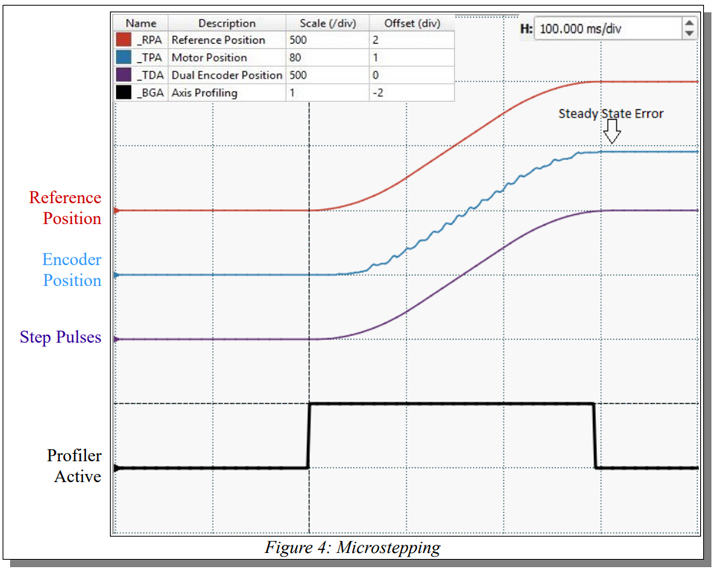
微步进的实际精度在很大程度上取决于外力。微步进在电动机的整个步进范围内都是精确的,但是,如果存在误差的一半以上,则会发生位置损失。如果摩擦,重力或任何其他力大到足以防止两个微步进位置之间的电流微小变化影响电机的位置,则不会发生运动。图4显示了在由与编码器耦合的步进电机驱动的系统中执行的点对点移动的曲线图。红线是步进电机的预期位置,紫线是输出到电机的步进脉冲,蓝线是由编码器测量的电机位置。黑线表示控制器何时在进行活动仿形。由于系统中的摩擦,步进电机
端点校正
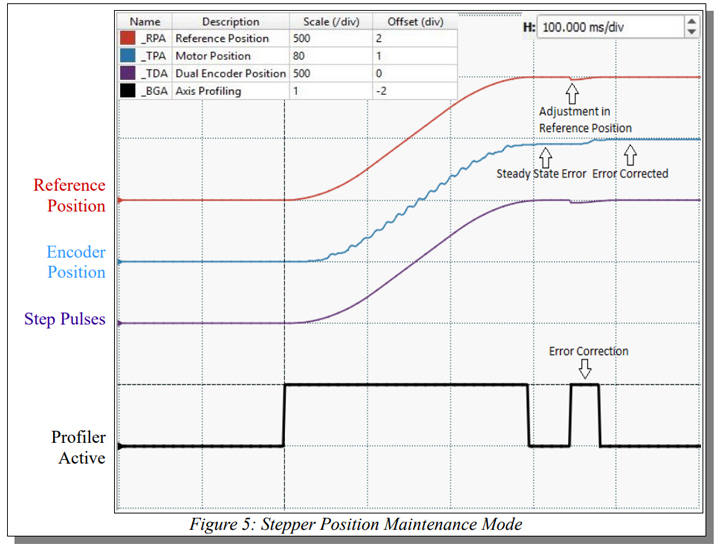
通过利用编码器反馈来识别该位置误差,可以通过命令附加步进脉冲将电动机置于正确位置来调整终点。我们将其称为“步进位置维护”模式或SPM。SPM仍以微步进模式操作步进器,但是现在可以验证和调整端点精度。该模式通过将步进电机的指令位置与即将完成移动之前从编码器输出的实际位置进行比较来工作。图5显示了与图4相同的系统,现在它正在步进位置维护模式下运行。移动结束后,将识别位置错误,并调整参考位置以解决该错误。然后命令进行纠错动作以将步进器带到正确的位置。通过添加编码器,控制器现在可以识别并纠正系统中存在的错误。现在可以考虑并纠正以前由于摩擦而导致稳态误差的相同动作。
闭环微步进
SPM模式适用于仅关注端点精度的应用。当需要不断纠正错误时,我们提供闭环微步(CLS)模式。图6显示了现在以CLS模式驱动的步进系统。除了参考位置和编码器位置之外,现在在控制器内部还产生一个错误信号(绿线),该信号用于连续调整步进电机的位置。重要的是要注意,在CLS模式下,现在基于编码器的位置对运动进行了分析,但是控制器仍然会产生步进脉冲来驱动步进电机。
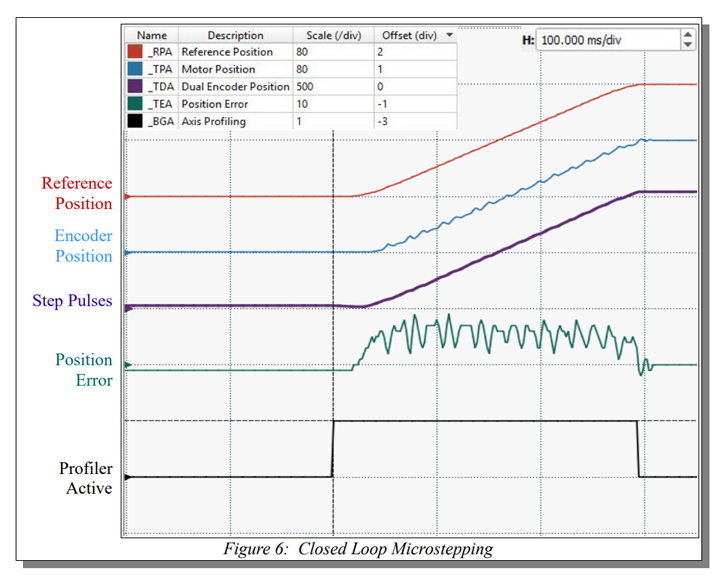
产生的误差信号通过我们的CLS滤波器馈送,该滤波器随后通过调整输出到步进器的步进脉冲来补偿系统中存在的任何误差。闭环微步进是一种真正的闭环操作模式,是仍作为步进电机驱动的步进电机的最佳使用方式。如果未正确调整环路,则闭环操作会带来不稳定的风险,因此必须注意实现稳定性。此外,与传统伺服系统相比,该模式仍然功耗低且带宽低。当使用具有低电流环路带宽和非线性特性的外部第三方步进驱动器时,可以使此低带宽更低。
作为两相无刷电机驱动步进电机
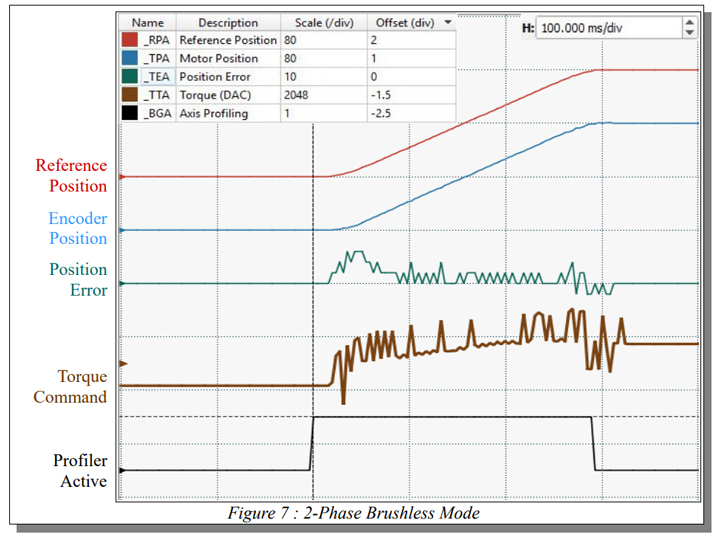
为了获得最高的性能,可以将步进电机视为两相无刷伺服电机。与标准伺服电机一样,然后将根据误差信号控制流向电机的电流。我们称为两相无刷模式或2PB。图7详细说明了以此模式驱动的步进电机系统。现在,控制器将生成转矩指令信号(棕线),而不是阶跃脉冲,并将其馈送到以2PB模式运行的我们内部放大器之一,以便控制电动机的位置。次。以2PB模式驱动的步进电机类似于减速机上安装的经典伺服电机。由于此模式的运行方式类似于标准伺服电机,因此可以利用我们的所有高级PID过滤器功能,包括陷波,极点,和前馈过滤器。为了以这种方式驱动步进电机,必须使放大器更复杂,以仅将瞬时所需电流正确地传递到电机。这样可以使步进电机有效地运行,并产生更少的热量。
闭环步进控制
通过利用我们的闭环步进控制方法,可以克服步进电机的各种缺点。可以通过步进位置维护模式来调整端点位置的精度,并可以通过闭环微步进来动态调整位置,最后可以将步进电机视为两相无刷伺服系统,以进一步提高电机的性能和效率。
TAG 闭环步进控制
