





Arduino单片机控制步进电机
步进电机是一种将电脉冲转化为角位移的执行机构。当步进电机的驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度(即步长)。通过控制脉冲个数来控制角位移量,达到准确定位的目的;通过控制脉冲频率来控制电机转动的速度和加速度,达到调速的目的。
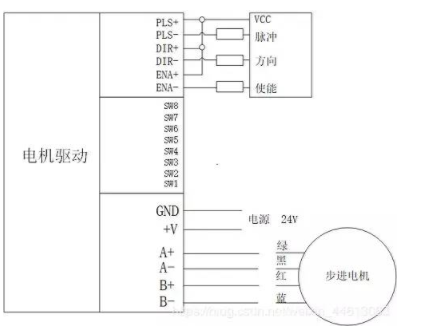
下面是连接图,右上角是 Arduino 与驱动器的连线,VCC、脉冲、方向、使能是单片机提供的 4 个引脚,字面意思是对于驱动器而言,与 Arduino 无关,选择 4 个输出引脚就行。VCC 与三个 +端 相连。
控制程序
这里使用 2、3、4、5 四个引脚与驱动器连接,只需要控制脉冲的次数和频率就能够控制电机转动的角度和速度。本来 Arduino 有专门的 Stepper 库来驱动步进电机,但功能比较简单,就自己写了,还有一个 tone() 频率函数,如果只控制速度可以使用一下。
代码如下:
#define VCC 2
#define PLS 3
#define DIR 4
#define ENA 5
void setup() {
pinMode(VCC, OUTPUT);
pinMode(PLS, OUTPUT);
pinMode(DIR, OUTPUT);
pinMode(ENA, OUTPUT);
}
void loop() {
digitalWrite(VCC, HIGH);
digitalWrite(ENA, HIGH);
digitalWrite(DIR, HIGH); //正转
//正转一圈,用时1s
//此处驱动器定义1600步为1圈
//本来1600X625微秒=1秒,因为时间间隔太短,程序运行也需要时间,间隔时间/2之后总时间差不多1秒
for(int x=0; x<1600; x++){
digitalWrite(PLS, HIGH);
delayMicroseconds(625/2);
digitalWrite(PLS, LOW);
delayMicroseconds(625/2);
}
delay(1000); //停1s
digitalWrite(DIR, LOW); //反转
//反转一圈,用时1s
for(int x=0; x<1600; x++){
digitalWrite(PLS, HIGH);
delayMicroseconds(625/2);
digitalWrite(PLS, LOW);
delayMicroseconds(625/2);
}
delay(1000); //停1s
}
上面的代码是让步进电机正转 1 圈后停 1 秒,再反转 1 圈后停 1 秒,转 1 圈的时间也是 1 秒,如此循环,可根据需要自己更改。
程序说明:VCC 给驱动器提供电源引脚,PLS 给步进电机提供脉冲引脚,DIR 决定电机是正转还是反转,ENA 是步进电机驱动器的开关,如果控制电路给 ENA 引脚高电压那么就相当于让驱动器接受控制信号,如果 ENA 提供低电压,无论怎么给脉冲信号电机都不会动。在 PLS 引脚产生一定频率的脉冲,并控制脉冲时间,就可控制步进电机。
TAG 步进电机
