





步进电机技术
介绍
深圳锐特机电技术有限公司位于广东深圳,是一家集研发、生产、销售步进电机驱动器、伺服驱动器、步进电机、伺服电机和主轴伺服电机产品于一体的步进电机厂家。公司的核心产品 包括伺服驱动器、混合式步进电机驱动器及伺服电机和各种步进电机。产品广泛应用于数控机床、铣床、包装、印刷、纺织、电脑绣花、雕刻机、医疗机械、缝纫机、物流等自动化控制领域和智能制造行业。公司在经营过程中始终坚持创新、品质至上,为顾客提供高性价比的产品。
什么是步进电机?
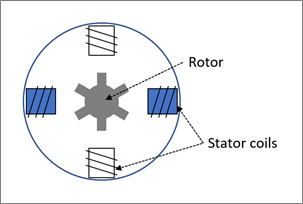
步进电机由一个由一系列电磁线圈制成的固定定子和一个由铁磁材料或永磁体制成的活动转子组成(见图1)。您可能会遇到三种主要的步进电机类型:
永磁(PM)步进电机在转子中使用PM,并通过转子PM与定子电磁体之间的吸引或排斥来工作。
可变磁阻(VR)步进电机使用普通铁磁转子,并根据最小磁阻原理进行操作。当通电的定子电磁体和转子齿之间的间隙最小时,即发生最小磁阻,即转子将移动以与可用于产生旋转的磁场对齐。
混合式步进电机使用PM和VR步进电机方法的组合运行。
步进电机基本操作
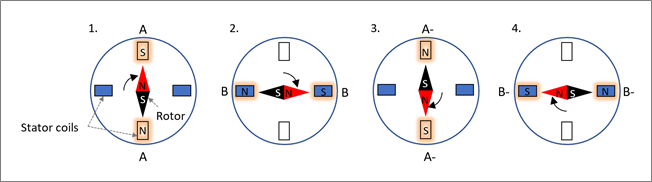
通过使用一系列电脉冲,定子电磁体可以以在转子中引起旋转运动的方式被激励。简化的永磁两相步进电机如下图所示(见图2)。
参考图2:
A相通电,使转子与已通电的定子线圈对齐。
A相关闭,B相在相邻线圈上通电,这使转子顺时针旋转90°。
B相断开,A相重新通电,但是这次极性相反(A-),这将导致转子进一步顺时针旋转90°。
A相关闭,B相重新通电,但是这次极性相反(B-),这会使转子进一步顺时针旋转90°。
重复此顺序会使转子继续旋转。对于逆时针旋转,应该颠倒顺序。每个步骤都会使转子移动固定角度,该角度取决于电动机内转子齿的数量。在两相步进电机中发现的典型全步距角为每步1.8°,这意味着转子每旋转一整圈将需要200步。
微步进使运动更平稳并提高精度
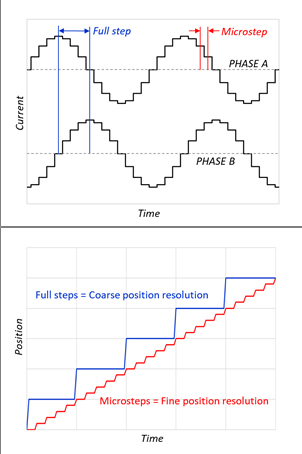
通过改变施加到定子线圈的电流量,可以将电动机的步进分辨率提高到比整个步进角更精细。这是通过将两个相位相差90°的正弦波电流信号传输到相邻的定子线圈来实现的。这具有减小一个线圈中的电流的作用,因为它会增加相邻线圈中的电流,这将导致转子位置位于两个线圈之间的某个位置(请参见图3和4)。这被称为微步,可实现的最小微步的大小取决于用于激励定子线圈的驱动电子设备的分辨率。
例如,OWIS的LIMES 84N步进电机线性位移台使用的步进电机每转具有200个完整步数(3轴组件见图5)。当与OWIS PS 90位置控制单元一起使用时,可以将每个完整步长分为另外256个微步长。电机每转一圈总共有51,200个微步,每微步有0.007°。当通过精密滚珠丝杠转换成直线运动时,微步进可以实现非常精细的位置增量。
除了提高电动机的精度外,微步进还具有许多性能优势。一个主要优点是减少了转矩脉动,这在全步模式下经常会遇到。在全步模式下,定子线圈将以最大电流通电或被关闭,这意味着当转子在每个全步位置之间移动时,可用转矩会有很大的变化。转矩波动会导致粗糙,不稳定的运动,从而导致噪音和不必要的振动。微步进解决了这个问题,因为定子线圈电流被逐渐施加,从而使各步之间的过渡更加平滑。
开环操作,简化控制
步进电机的每个微步对应一个小的固定运动增量。为了到达某个位置,控制器仅需要计算从原点或参考位置经过的微步数。在开环模式下,不需要其他位置反馈编码器。这将导致更简单,成本更低的运动控制解决方案。开环模式还使电动机对输入的驱动信号具有出色的响应,从而产生快速的启动/停止响应时间。
由于在开环操作中没有反馈和伺服控制,因此步进电机可以非常稳定地保持固定位置,而不会产生不必要的伺服抖动。同样,由于即使静止时定子线圈也保持通电,因此可以实现高保持转矩,从而使步进电机成为步进和保持应用的理想选择。
步进电机的缺点
步进电机有一些缺点。首先,缺少位置反馈会导致位置完整性受损的情况,尤其是在超过电机扭矩规格的重负载下使用时。高负载会导致电机不必要的运动或失速,再加上缺少位置反馈,可能会导致位置读数错误。
如果需要绝对位置,则开环模式还要求获取位置参考。这意味着在运行应用程序之前,必须先执行归位循环。如果电机或控制器发生电源故障而需要重新启动原点循环,则位置信息也会丢失,然后才能恢复应用程序。如果绝对位置对应用至关重要,则使用具有绝对位置反馈的运动控制解决方案将更为合适。
步进电机的优点之一是能够保持固定位置,但这种操作模式也有缺点。定子线圈在静止或低速运行时仍保持通电,这意味着会产生过多的热量。如果没有有效的散热,那么多余的热量可能会成为敏感应用的问题。这可以通过仔细控制提供给电动机的相电流来克服,但要以保持转矩为代价。在这些情况下,最好考虑使用直流伺服电机作为替代方案。
在低速和低加速度下,步进电机通常是首选。但是,在较高的转速下,步进电机可能产生的转矩会降低。发送到定子线圈的驱动信号在线圈内产生磁场。正是这种磁场在转子中引起运动。当以低速运行时,有足够的时间让电流流过线圈以感应强磁场,从而使电动机能够提供其完全额定的转矩性能。如果旋转速度增加,则响应于驱动信号,使线圈完全通电的时间更少。这导致减小了可用于电动机的转矩。
摘要
步进电机提供了一种非常有效的运动控制解决方案,通常其成本要低于同等的伺服电机。它们也是高度可靠的,在电动机内不包含接触衬套,从而延长了电动机寿命,使其成为OEM和工业应用的理想解决方案。
步进电机以微步模式运行的能力可以提供许多光子运动控制应用中经常需要的非常高的精度。微步进功能还使步进电机具有较宽的速度范围,即使在非常低的速度下也可以提供稳定的运动。
步进电机的简化开环操作也是主要优势,可为最终用户节省成本和时间。大量尺寸和功率选项可供选择,这使得步进电机可用于各种精密运动控制应用,包括:
影像扫描
步进并保持定位和测量
相机和传感器定位
镜头和镜子定位
2D和3D打印应用
需要低加速度和高保持扭矩的应用
TAG 步进电机技术
