





步进电机驱动器使用说明
什么是步进电机驱动器?
步进电动机驱动器是一种用于驱动步进电动机的电子设备。它本身通常不执行任何操作,必须与锐特R60之类的控制器一起使用。
步进电机驱动器有很多不同类型,但总的来说,它们都做同样的事情–移动步进电机。

为什么需要步进驱动器
步进电机需要控制器根本无法产生的电压和/或电流。因此,我们需要使用步进电机驱动器。该电子设备会将我们的运动指令从控制器转换成一个顺序,在该顺序中,步进电机的绕组将被打开或关闭,同时仍为其提供足够的功率。
所有这些当然可以由驱动几个FET的微控制器来产生,但是设计和编程需要时间。幸运的是,已经有解决方案。
驱动程序类型
通常,有两种类型的驱动程序。恒压驱动器(左/右驱动器)和恒流驱动器(斩波器驱动器)。
恒压驱动器(左/右驱动器):
它们比恒流驱动器便宜
用电压产生扭矩
通常效率不高
比斩波驱动器的性能更差
恒流驱动器(斩波器驱动器):
更贵
更复杂的电路
使用恒定电流产生扭矩
比左/右驱动器更好的性能
由于有许多可用的IC,并且提供了更好的性能,因此几乎总是使用恒定电流驱动器。您会发现已经具有集成FET的集成电路,这些集成电路通常用于较低的电流(最大为A),因为它们很小,并且散热可能会成为问题。另一种类型使用外部FET,最大电流仅受所用外部FET的限制。
微步进
步进电机通常以1.8°的步进运动,即每转200步。当我们需要小动作时,这可能是个问题。一种选择是使用某种传输方式,但还有另一种方式-微步进。微步进意味着我们每转可以拥有200多个步长,进而运动更小。该选项已经集成在大多数IC中。
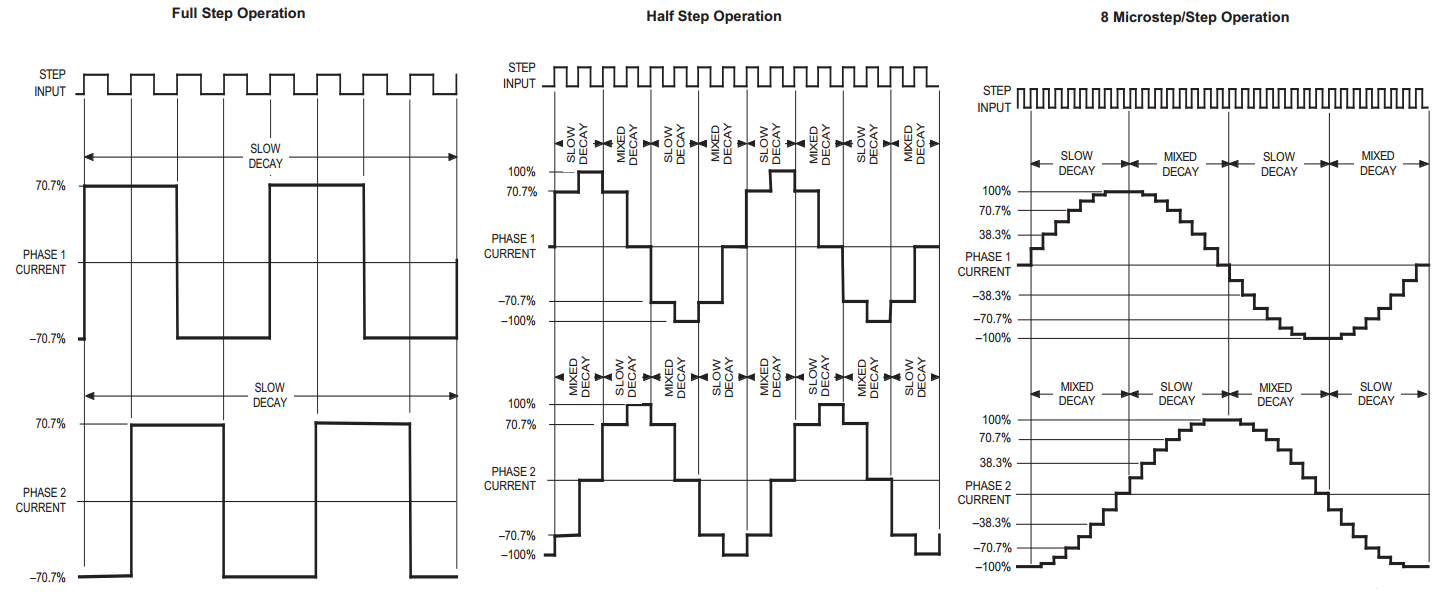
当以全步长驱动步进电机时,步进电机驱动器的输出看起来像一个方形信号,并产生粗糙的运动。微步距越大,输出信号看起来就越像正弦波,步进电机的运动也就越平稳。但这有一个缺点。随着微步进值的增加,转矩会下降很多,如果该值太大,则可能会导致电动机无法产生足够的转矩甚至无法转动。通常,1 / 4、1 / 8甚至1/16可以产生令人满意的平滑运动,同时仍然产生足够的扭矩。
下图显示了在选择不同的微步进值时输出如何变化。您可以看到输出看起来越来越像正弦波。
那么这些值到底意味着什么?
微步进告诉我们,一个步进器应进行多少微步才能产生一个完整的步。1/1值告诉我们,步进器必须进行一个微步才能产生一个完整的步(因此没有微步)。1/2的值称为半步,它告诉我们步进电机必须以2微步为一个完整的步。这意味着步进电机应转一整圈400步。1/8的值将告诉我们,电动机每整步走8微步,每整圈走1600步。相同的原理适用于所有微步进值。
如何驱动步进电机驱动器
大多数步进电机驱动器都有一个步进/方向输入。这意味着每个驱动程序仅需要两个信号。步进信号用于进行步进,看起来像PWM信号。每个脉冲意味着步进器将移动一步(或微步)。dir信号表示方向,并用于发出信号指示步进旋转的方向(CW或CCW)。
结论
我们发现,如果我们的设计要求使用步进电机,则必须使用步进电机驱动器,因为控制器无法产生足够的电流和足够的高压。有不同的类型,但斩波驱动程序可提供最佳性能。而且,微步进乍一看提供了一个很好的解决方案,但产生了扭矩减小的问题。它仍然非常有用,但必须正确使用。有许多不同的IC可用于驱动步进电机,许多已经制造的解决方案(例如锐特R42和R60)可提供即插即用解决方案,并且易于使用。
TAG 步进电机驱动器
