





怎样选择步进电机和驱动器
文章来源:锐特步进电机 时间:2019-07-11 08:46:27 浏览:
步进电机原理是一种将电脉冲转化为角位移的执行机构。通俗一点讲:当步进驱动器接收到一个脉冲信号,它将驱动步进电机按设定的方向转动一个固定的角度(及步距角)。你可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时,你可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。因此,在需要准确定位或调速控制时均可考虑使用步进电机。
步进电机分三种:永磁式PM,反应式VR,混合式HB。
永磁式步进一般为两相,转矩和体积较小,步进角一般为7.5度或15度,

反应式步进一般为三相,可实现大转矩输出,步进角一般为1.5度,但噪音和振动都很大。在欧美等发达国家80年已被淘汰。
混合式步进吸收了永磁式和反应式步进的优点。它又分为两相、三相和五相:两相步进角一般为1.8度,三相步进电机步距角为1.2度,五相步进电机步距角一般为0.72度。两相步进应用最为广泛。
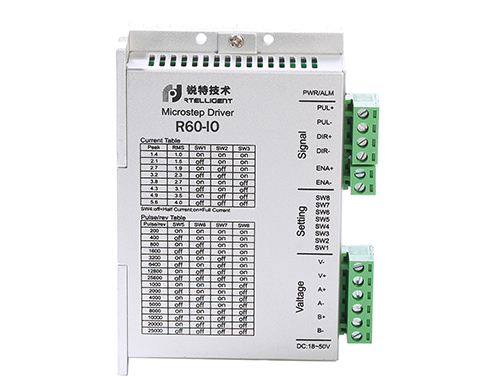
步进电机和驱动器
一:判断需要多大的力矩
静扭矩是选择步进电机的主要参数之一。负载大时,需采用大力矩电机。力矩指标大时,电机外形也大。
二:判断电机转速速度
转速要求高时,应选相电流较大的电机,以增加功率输入,且在选择驱动器时采用较高供电电压。
二:选择电机的安装规格
如57,86,110等,主要与力矩要求相关。确定定位精度与振动方面的要求情况:判断是否需细分,需多少细分。根据电机的电流、细分和供电电压选择驱动器。
TAG 步进 电机 驱动器
