





如何驱动步进电机-厂家指南
您正在计划第一台需要精确定位的3D打印机,CNC路由器或其他机器。环顾四周会导致许多人谈论步进电机。但是它们到底是什么,特别是-如何驱动步进电机?
深圳步进电机厂家已经收集了一些基本的误解和问题,人们一直在问我有关驱动步进电机的问题。从运行步进电机后面的高级逻辑开始,到最后出现一些常见的问题。
将此视为简化的初学者指南。我不会深入探讨可能会变得非常复杂且依赖于应用程序的技术和计算方面的内容。您可以稍后再学习。您当前的任务是最有可能使电动机运行并了解运行步进电动机的基本知识。
目录供快速参考
什么是步进电机?
您需要什么来使步进电动机运行?
驱动器
微控制器
电源
您需要了解的电动机和驱动器类型
双极和单极电机
驱动类型
斩波驱动的好处
如何将步进电机连接到驱动器
以双极配置连接4或6步进步进电机
以单极配置连接5或6引线步进电机
常见问题,问题和误解
在没有微控制器的情况下如何运行步进电机?
如何将步进电机旋转90度(或任何其他角度)
如何控制步进电机的速度?
步进电机可以连续运行吗?
什么是保持转矩(电流),为什么需要它?
我需要什么驱动程序来运行NEMA 17电动机(或NEMA 24等)?
最后的话
什么是步进电机?
在线上有很多资源,它们详细介绍了不同类型的步进电机及其工作方式。例如,查看有关步进电机类型的文章。但这暂时并不重要。您需要知道的是,步进电动机不是您的普通直流电动机。它们不会通过直接连接到电源来运行。它们通常具有4线制,但还有5、6和8线制电动机。
步进电动机的旋转由励磁线圈以正确的顺序和极性控制。每当电动机中的线圈励磁时,电动机就会精确地移动一个小的预定角度(称为步进)。但是电动机不会连续运行-通电时它会保持位置不变。步距角通常为1.8度。这意味着您必须走200步才能完成完整的360度转弯(1.8 * 200)。在youtube上观看此出色的视频,该视频通过以正确的顺序为线圈通电来可视化驱动步进电机。
即使它们用于精确定位,也没有像伺服器那样的任何位置反馈机制。但是,如果使用正确-则完全没有必要。控制旋转和位置是通过执行正确数量的步骤来完成的。
您需要什么来使步进电动机运行?
下一章是非常概述。请进一步阅读有关驱动器和电动机类型的更多实用信息。但是这里介绍的基础知识是相当普遍的,并且在DIY社区中被广泛使用。
那么,我们需要什么来使这些电动机运转?让我们将其分解为各个组件,并简要说明每个部分。通常,您需要以下零件来驱动步进电机。
驱动器
微控制器
电源
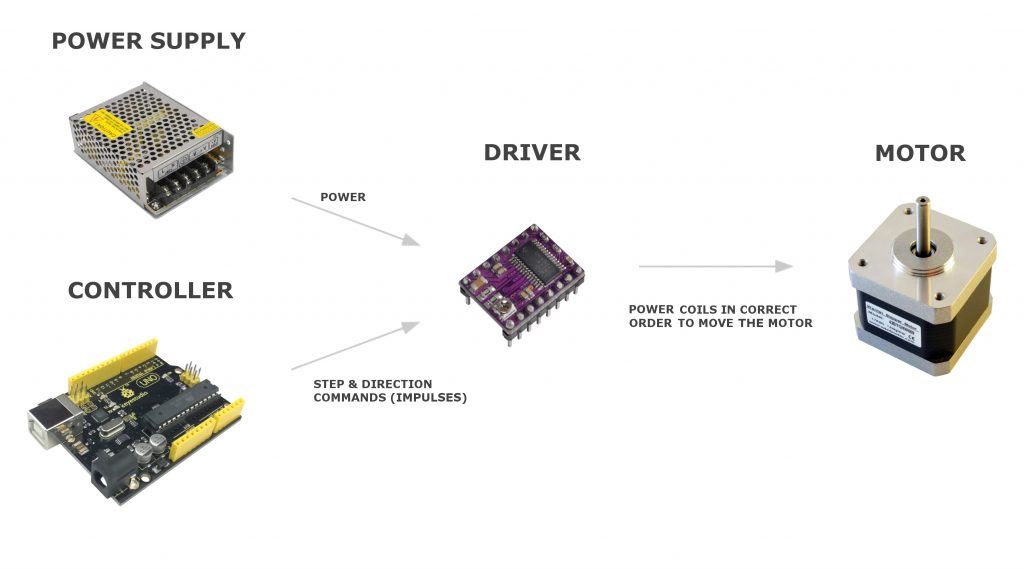
由于不言而喻,这里没有包括用于(微)控制器的电源。在这种情况下,像Arduino这样的微控制器都是通过USB电缆或电池供电的。
驱动器
众所周知,通过以正确的顺序(和极性)向线圈通电,步进电机可以一次移动一步。您可以通过一些开关手动进行此操作(逐步操作),但是除了学习之外,它没有实际用途。这是驱动发挥作用的地方。
驱动正在做繁重的工作,它将所有复杂性隐藏在一个简单的界面后面。它可以根据输入信号以正确的方式激励正确的绕组。它们通常只有2个输入引脚,它们以数字高电平和低电平的形式接受命令。一个设置 的旋转方向和其他为步骤的命令。
但这并不像将步骤引脚连接到逻辑高电平并期望驱动器连续移动电机那样简单。它仍然只会迈出一步。
步骤以数字脉冲形式给出。每一步(HIGH)之后必须有(LOW)输入一会儿。因此,驱动器可以检测到何时发出了新的步进命令。如果没有给出脉冲-驱动器和电机将不会执行任何步骤。
数字信号LOW / HIGH示例
在进行步进操作时,方向输入引脚始终可以为LOW或HIGH,这取决于所需的方向。方向不需要冲动。
注意:一些小型单极电动机通过uln2003和ln2004等晶体管阵列或芯片驱动。可以有4条控制线,而不是来自微控制器的2条。在这种配置中,微控制器通过 “手动”在每个步骤上正确 地接通电线(线圈)来直接告诉哪些电线(线圈)通电。在Arduino页面上查看示例架构。
微控制器
可以通过用HIGH电线手动触摸驱动器上的踏板来使电动机运动。但是,除了测试之外,这不是很实用。这就是微控制器发挥作用的原因。微控制器每秒可以产生数百甚至数千个脉冲,因此电机可以非常快速和准确地旋转。
通过GIPHY
控制器本身不知道您想如何移动电动机才有用。控制器上必须安装某种软件(固件)。如果要构建CNC路由器或3d打印机,则可以使用他人已经编写的软件。
当创建一些自定义的东西时,您需要深入编程。为了进行测试,可以使用一个非常简单的程序,该程序仅使电动机沿一个方向步进。这是Arduino的示例代码。
// Define Arduino pins for STEP and DIRECTION
const int dirPin = 8;
const int stepPin = 9;
//Define delays between commands, you can play with these
const int delayStepCommandInMicroSeconds = 50; // Time STEP will be HIGH (pulse)
const int delayBetweenStepInMicroSeconds = 1200; // Time STEP will be LOW
void setup() {
pinMode( stepPin, OUTPUT);
pinMode( dirPin, OUTPUT);
}
void loop() {
// Enables the motor to move in a particular direction
// Remove // to change motor direction
// digitalWrite( dirPin, HIGH );
// make 200 pulses which correspond to 360
// degrees (one full rotation) when using
// 1.8 step degree motor in full-step mode
for( int x = 0; x < 200; x++ ) {
digitalWrite( stepPin, HIGH );
delayMicroseconds( delayStepCommandInMicroSeconds );
digitalWrite( stepPin, LOW );
delayMicroseconds( delayBetweenStepInMicroSeconds );
}
//Wait one second in a standstill and start over from top
delay(1000);
}
对于更简单的应用程序,这可能就足够了,但是任何处理较重负载和更复杂操作的事物都应使用一些库。对于Arduino,您可以使用AccelStepper库。使用TB6600驱动程序查看我的简单示例代码。在那里您可以看到诸如加速和设置最大速度之类的功能。
电源
大多数驱动器和电动机都需要外部电源。某些小型Arduino套件电机可以在USB / Arduino电源上以“ 28BYJ-48”运行。但是,任何更大的事物都需要更多的功率和电压。对于测试,您很可能可以使用一般的计算机或笔记本电脑电源。
您需要了解的电动机和驱动器类型
在上一节中,我对步进电机的驱动方式进行了概述。但这比将事情挂起来要复杂得多。有不同类型的驱动器,电机和接线方案。
双极和单极电机
广义上讲,有两种类型的步进电机-双极和单极。区别在于电机内部的线圈如何接线以及如何为每个步骤通电以获取正确的磁极。一切都归结为一个简单的问题。步进电机有几根电线?根据从电动机引出的电线,我们可以确定它是哪种电动机以及需要哪种驱动器来运行它。
四线电机只能由双极驱动器驱动。由于中心抽头在内部连接在一起,因此只能通过单极驱动器来驱动5线制电动机。可以使用6线和8线的电机同时使用这两种驱动器,因为您可以决定如何将它们连接到外部。
区别在于电机内部的线圈如何通电。在双极电动机中,每一步的电流(极性)必须反向。单极电动机在线圈中实现了极点反转槽中心抽头,但同时仅给线圈的一半通电。Adafruit有一篇有关单极与双极电机线圈和接线的好文章。如果您熟悉它们之间的差异,那么绝对是加分项。
驱动类型
除了是单极和双极驱动器以外,还有其他方法来控制电动机绕组中的电流和电压。主要类型如下:
恒压驱动器也称为L / R驱动器
恒定电流驱动器也称为斩波器驱动器
我不会详细介绍单极驱动器或恒压驱动器,因为您很可能最终会得到带有双极电动机的恒流驱动器。由于L / R步进驱动器的扭矩和速度的限制,斩波器驱动器是当今最流行的驱动器。
斩波驱动的好处
当使用斩波器驱动器时,电动机的标称电压实际上与实际无关。至少对于业余用户和Arduino爱好者而言。因此,不要因为极低的额定电压而害怕步进电机。重要数字是额定电流。
斩波驱动器可以使步进电动机以比电动机的额定电压高得多的电压运行。较高的电压可使电流更快地流过步进电机,从而可以通过更大的转矩更快地转动它。驱动器使电动机中的电流保持在固定值以下,从而使电动机烧坏。另外,更高的电压意味着更少的热量。
固定电流通常由驱动板上的微调电位器设置。这样,您就可以根据所需扭矩和电动机规格的额定电流来更改最大电流。
(斩波器)步进电机驱动器上的限流电位器示例
如何将步进电机连接到驱动器
有2种配置。我目前仅更深入地解释双极,但也有一天会添加单极。无论如何,双极配置如今越来越流行。
以双极配置连接4或6引线步进电机
如今,四线步进电机是最简单,最受欢迎的配置。您只需要找出构成一对的引线即可。最简单的方法是使用万用表测量来自步进电机的电线之间的电阻。4线制电动机最简单。如果没有读数,则说明未连接。如果您阅读,那是一对。您甚至可以通过不动万用表就可以做到这一点,只需在触摸电线时转动电机即可。会使电动机更难移动的任何组合都是一对。
在6线制电动机中,您必须找到外部引线并跳过中心的公共引线。中心引线将恰好是外部引线的电阻的1/2。只需开始测试导线对,并找出构成最大电阻的导线对即可。
现在可以将这2对线对连接到驱动器。通常,这些对称为A和B。在我的示例中,它们连接到双极A3967驱动器,该驱动器上有清晰的标记,指示引向何处。有时,驱动器上的连接器标记为A1,A2和B1,B2。有时它们被标记为A-,A +和B-,B +。一对中的哪种连接方式都没关系。它仅改变电动机的旋转。
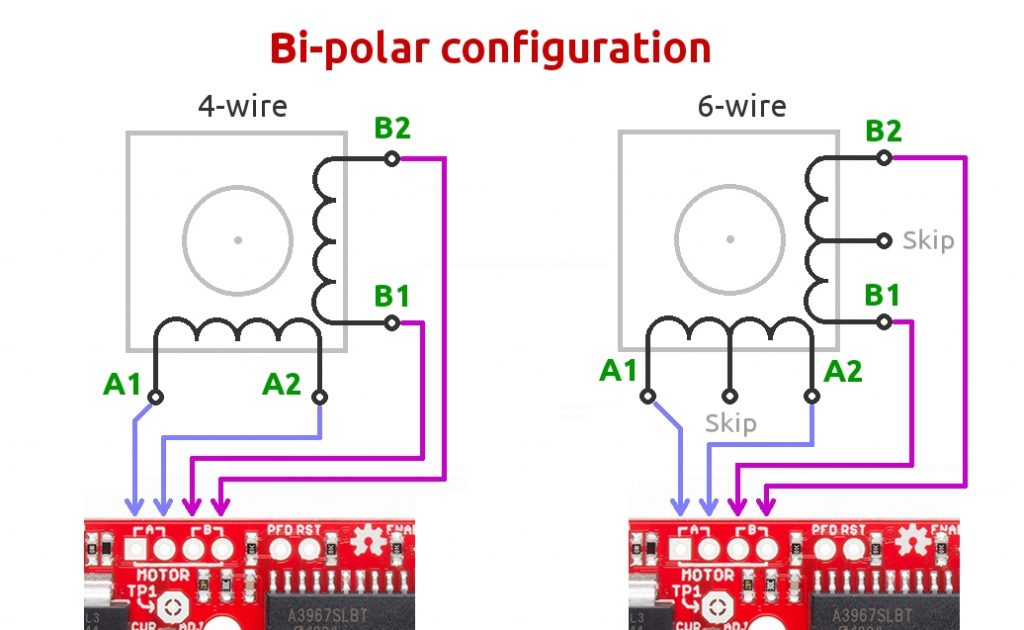
带A3967双极驱动器的4引线和6引线步进电机的接线图
以单极配置连接5引线或6引线步进电机
5线制步进电机只能以单极性接线。6线电机均可使用。要在单极配置中使用6线制电机,只需将中心抽头连接在一起。连接的中心抽头将是第五根线,您可以将其用作5线步进器。
单极步进电机到驱动器的接线要难一些。您必须找出正确的电线顺序。否则,电动机只会向前和向后步进。在youtube上观看该视频,非常容易遵循,并在很大程度上解释了查找正确订单的过程。
常见问题,问题和误解
我列出了人们问我和论坛的一些常见问题。让我知道我是否错过了清单中的重要内容。
在没有微控制器的情况下如何运行步进电机?
这是完全有可能的,因为驱动器不在乎它在哪里步进脉冲。您只需要某种来源的脉冲和方向。
最简单的选择是使用NE555定时器芯片。观看此视频。肯定存在一些应用,其中频率发生器和一些按钮和旋钮是可行的解决方案。也许是摄影间隔拍摄滑块?但是,也许改用休闲直流电动机会更容易些吗?
如何将步进电机旋转90度(或任何其他角度)
由于步进电机每次移动一步,因此您需要知道一步的度数。极有可能是每步1.8度。这意味着当指示电机进行200步(1.8度* 200步= 360度)时,将实现全旋转。
因此,真正的问题将接following而至。将电机旋转90度需要几步?
对于带有1.8度电机的90度示例,我们遵循一个简单的公式得出了50个步骤。
90度/ 1.8度=> 50步
这是另一个移动45度的示例:
45 / 1.8 => 25步
如何控制步进电机的速度?
速度由给定时间段内给出的步进命令数量控制。如果您发送400步命令以在一秒内驱动,并且电机为每步1.8度。您最终将电动机旋转了整整2圈。这使得速度为每秒2转(2rpm)。
实际的一步运动本身不能更改,因为它发生在快速电动机能够运动的时候。但是有可能使用微步进行平滑处理。
步进电机可以连续运行吗?
是。步进电机设计为连续向前或向后旋转。
什么是保持转矩(电流),为什么需要它?
即使转子本身静止,步进电动机的绕组也会通电。这需要在静止不动时将负载保持在适当的位置。
保持转矩是在线圈通电且转子静止时,使电机整步移动所需的转矩量。保持电流通常是电动机在静止状态下可以承受的电流和驱动器提供的电流。
但是,为什么我们在静止时需要动力?
您可能会认为,当电动机不转动时,是否不需要为线圈供电?可以这样,但前提是它不能通过外力移动。如果其他组件可以移动位置,则可能需要通过不断开线圈电源来保持电动机静止。否则,在不使用时,电机可能会由于机器中其他轴施加的某些力而失去位置。
我需要什么驱动程序来运行NEMA 17电动机(或NEMA 24等)?
Nema 17对于步进电机的电气特性不是标准的。它只是面板和标准安装孔,使更换电动机变得更加容易。您很有可能必须从规格中检查该电动机的额定电流是多少,是单极还是双极。基于此选择驱动程序。
注意:驱动器总是比电动机强大,但必须限制驱动器侧的电流。也可以使用额定电流较小的斩波器驱动器,但是电动机功率不足。
但是可以肯定的假设是,电动机的尺寸是NEMA 17可以使用1A – 2A电流,而NEMA 23可以使用大约2A – 5A电流。
最后的话
本文的目的是对如何驱动步进电机进行高级别概述。希望我已经讲授,您现在对这个主题有了更好的理解,可以开始尝试了。
现在,真正的乐趣和学习开始了。
除了介绍的这些基本概念外,还有很多其他内容。会有振动,扭矩,冷却电机,选择硬件,缺少步骤,计算步骤和配置软件的问题。由于链中的所有依赖性,步进电机项目容易出现问题。从硬件或电源开始,到配置错误或程序错误。基本的调试技巧在这里非常方便,如果硬件出现故障,可以使用其他组件进行切换。
我是否回答了所有基本问题?还是我错过了一些让您感到疑惑的关键概念?在评论中让我知道。我将不胜感激,因此可以改进本文。
TAG 步进电机厂家
