





什么是PIV伺服控制?
什么是PIV伺服控制?它通常包括两个部分:前馈控制,它将辅助速度和(在某些情况下)加速度信号添加到伺服环路中,以改善命令跟踪;以及PID或PIV控制,其作用是使系统的干扰抑制最大化。PID和PIV控制之间的区别在于PID控制基于位置误差,而PIV控制则基于位置误差和速度误差。
在伺服系统中,干扰是意料之外的力,无法预先建模。例如,负载惯量的变化或电机轴上的转矩变化。
PID控制是伺服调整的常用方法,非常适合可以建模为线性函数的应用程序,该函数不会随时间变化。PID算法的输入是一个误差信号(指令位置和所达到位置之间的差),输出只是三个信号的总和:一个与误差成比例的信号,一个与误差积分成比例的信号,和与误差的导数成正比的信号。
什么是PIV?
PIV控制又向前走了一步,并将速度反馈环放置在位置反馈环内。该附加反馈回路使PIV控制在调节速度方面比PID控制更好。通常,速度环使用PI(比例,积分)控制,而位置环使用P(比例)控制。速度校正信号由位置误差乘以比例增益K p确定。积分增益K i应用于速度误差(而不是如PID控制器那样应用于位置误差)。导数增益K d替换为速度反馈增益K v。
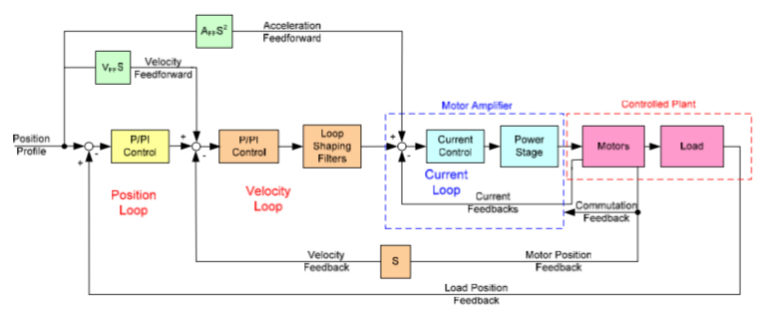
PIV控制包括嵌套在位置环内的速度环。
图片来源:ACS运动控制
速度反馈增益K v类似于微分增益K d。然而,在K d标度位置误差的导数(即瞬时轨迹位置和反馈位置之间的差)的情况下,K v仅标度从反馈设备估算的速度。
速度反馈是从电机编码器获取的,而位置反馈通常是从安装在负载本身上的反馈设备获取的。这种双反馈有助于更好地补偿由于皮带,螺钉,齿轮和其他机械连接引起的系统中的反冲或低刚度。请注意,使用高分辨率反馈进行速度估计很重要,因为分辨率不足会导致速度波动。
通常认为PIV控制器的调整比PID控制器的调整容易。这是因为PIV控制器中的嵌套速度和位置回路使调整过程大部分是非迭代的,其中PID控制器调整可能需要进行多次迭代才能实现所需的命令跟踪和适当的干扰抑制。
TAG PIV伺服控制
