





解析机器人身上的伺服系统
随着工业自动化的发展,越来越多的领域开始使用工业机器人代替人力。对于机器人制造商和机器人消费者而言,选择合适的伺服电机始终是一项艰难的任务。机器人的关节驱动离不开伺服系统,伺服控制系统则是实现机器人机械本体控制和伺服机构控制的重要部分。因而要了解机器人的运作过程,必然绕不过伺服系统。
伺服系统
伺服系统是以变频技术为基础发展起来的产品,是一种以机械位置或角度作为控制对象的自动控制系统。伺服系统除了可以进行速度与转矩控制外,还可以进行精确、快速、稳定的位置控制。
广义的伺服系统是精确地跟踪或复现某个给定过程的控制系统,也可称作随动系统。
狭义伺服系统又称位置随动系统,其被控制量(输出量)是负载机械空间位置的线位移或角位移,当位置给定量(输入量)作任意变化时,系统的主要任务是使输出量快速而准确地复现给定量的变化。

伺服系统的结构组成
机电一体化的伺服控制系统的结构、类型繁多,但从自动控制理论的角度来分析,伺服控制系统一般包括控制器、被控对象、执行环节、检测环节、比较环节等五部分。
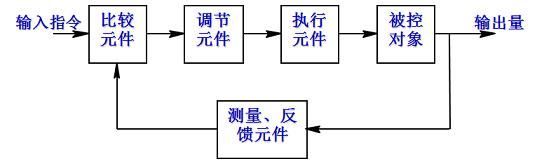
伺服系统组成原理框图
1、比较环节
比较环节是将输入的指令信号与系统的反馈信号进行比较,以获得输出与输入间的偏差信号的环节,通常由专门的电路或计算机来实现。
2、控制器
控制器通常是计算机或PID(比例、积分和微分)控制电路,其主要任务是对比较元件输出的偏差信号进行变换处理,以控制执行元件按要求动作。
3、执行环节
执行环节的作用是按控制信号的要求,将输入的各种形式的能量转化成机械能,驱动被控对象工作。机电一体化系统中的执行元件一般指各种电机或液压、气动伺服机构等。
4、被控对象
被控对象指被控制的物件,例如一个机械手臂,或是一个机械工作平台。
5、检测环节
检测环节是指能够对输出进行测量并转换成比较环节所需要的量纲的装置,一般包括传感器和转换电路。
TAG
