





怎么通过树莓派的GPIO接口控制步进电机
通过普通IO口控制步进电机,最好选择开关量控制型的步进驱动器,如下图所示:
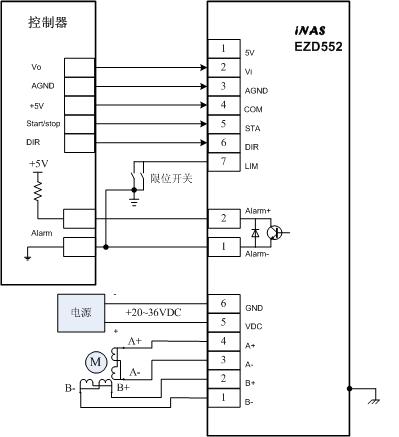
可以通过电位器或输出模拟量控制电机的速度,同时开关量控制电机的运行。
有个RaspRobot接口板,自带了一个库,你用这个库控制就可以,单极双极都行,伺服也可以(板子上有两个H桥)
先学linux,有空的话学下数字电路和模拟电路,学c和c++,学嵌入式及嵌入式编程...........,道路很漫长,要学的很多,不过你这个年纪学起来应该很快
建议用Python。
你是新手的话,Linux下的C语言的Cmake编译机制需要画时间学习。
不如直接Python。
新建一个名为的程序,程序的具体内容如下:
123456789101112131415 #!/usr/bin/env python# -*- coding: utf-8 -*- import RPi.GPIO as GPIOimport time GPIO.setmode()# need to set up every channel which are using as an input or an outputGPIO.setup(11, ) while True: (11, ) (1) (11, ) (1)
使用cd命令进入文件所在目录,然后输入指令
1 sudo python
使用这种方法实现LED闪烁的最容易的方法,网上的教程也非常多,是入门树莓派的好方法。
2.2 wiringPi
新建一个名为的程序,程序内容如下
1234567891011 #include < (){ wiringPiSetup () ; pinMode (0, OUTPUT) ; for (;;) { digitalWrite (0, HIGH) ; delay (500) ; digitalWrite (0, LOW) ; delay (500) ; }}
使用cd命令进入所在文件目录,然后输入以下命令生成可执行文件blink
1 gcc -Wall -o blink -lwiringPi
TAG
