





使用齿轮步进电机的原因
步进电动机以其精确的定位能力和低速下的高扭矩输出而著称,但它们需要仔细确定尺寸,以确保电动机与负载和应用参数相匹配,以最大程度地减少失步或电动机失速的可能性。在步进电机系统中添加齿轮箱可以通过降低负载与电机的惯性比,增加负载转矩以及减少电机振荡来改善电机性能。
减小负载与电机的惯性比
步进电机应用中缺少步距的一个原因是惯性。负载惯量与电机惯量的比值决定了电机可如何驱动或控制负载,尤其是在运动曲线的加速和减速部分。如果负载惯量显着高于电机惯量,则电机将难以控制负载,并且可能会发生过冲(超速步数超出指令范围)或下冲(欠步数)。很高的负载惯性比也可能导致电机消耗过多电流并停转。
运动惯量比
JL =负载惯量
JM =电机惯量
降低惯性比的一种方法是使用更大惯量的电动机。但这意味着更高的成本,更多的重量以及对系统其他部分(如联轴器,电缆和驱动器组件)的滴流作用。取而代之的是,在系统上增加一个齿轮箱将负载与电机的惯性比降低了齿轮比的平方。
i =齿轮减速
增加负载的转矩
使用带有步进电机的齿轮箱的另一个原因是增加可用于驱动负载的转矩。当负载由电动机-齿轮箱组合驱动时,齿轮箱会将电动机的扭矩乘以与齿轮比和齿轮箱效率成比例的量。
To =变速箱轴上的扭矩输出
Tm =电机轴上的扭矩输出
η=变速箱效率
但是,尽管变速箱增加了扭矩,但它们却降低了速度。(这就是为什么有时将它们称为“齿轮减速器”或“减速器”的原因。)换句话说,当齿轮箱连接到电动机时,电动机的旋转速度必须更快-等于齿轮比-将目标速度传递给负载。
No=变速箱轴上的速度输出
Nm =电机轴上的速度输出
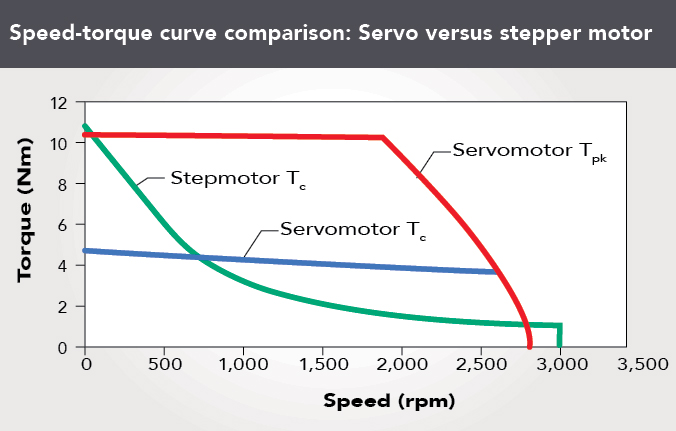
并且,由于制动转矩和其他损失,步进电动机转矩通常随着速度的增加而迅速减小。速度与转矩之间的这种反比关系意味着,在电动机无法传递所需转矩之前(即使乘以齿轮比),仅将速度增加一定量才是可行的。
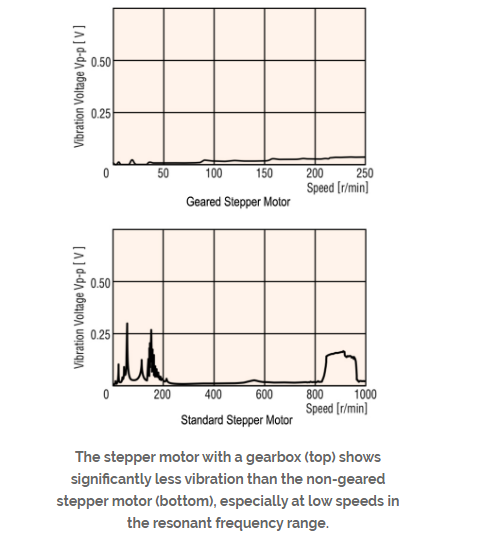
减少共振和振动,
但是加速电机确实有好处。当安装齿轮箱时,电动机需要的额外速度意味着电动机在其共振频率范围之外运行,在该共振频率范围内,振荡和振动会导致电动机失步甚至失速。
除了确保齿轮箱具有正确的扭矩,速度和惯性值外,选择高精度,低反冲齿轮箱也很重要-特别是在将齿轮箱连接到步进电机时。
回想一下,带齿轮箱的步进电机在开环系统中运行,齿轮箱中的齿隙降低了系统的定位精度,而没有反馈来监视或纠正定位误差。这就是为什么步进应用经常使用高精度的行星齿轮箱,其间隙低至2至3弧分的原因。一些制造商提供了带有谐波齿轮的步进电机,这些谐波齿轮在大多数应用条件下都可以实现零背隙。
TAG 齿轮步进电机
