





厂家带你探讨伺服电机及其工作原理
在本文中,厂家将带你讨论什么是伺服电动机以及它是如何工作的,因此,让我们首先确定什么是伺服电动机,并研究一下伺服电动机类型及其应用的一些独特功能。
伺服电机基础
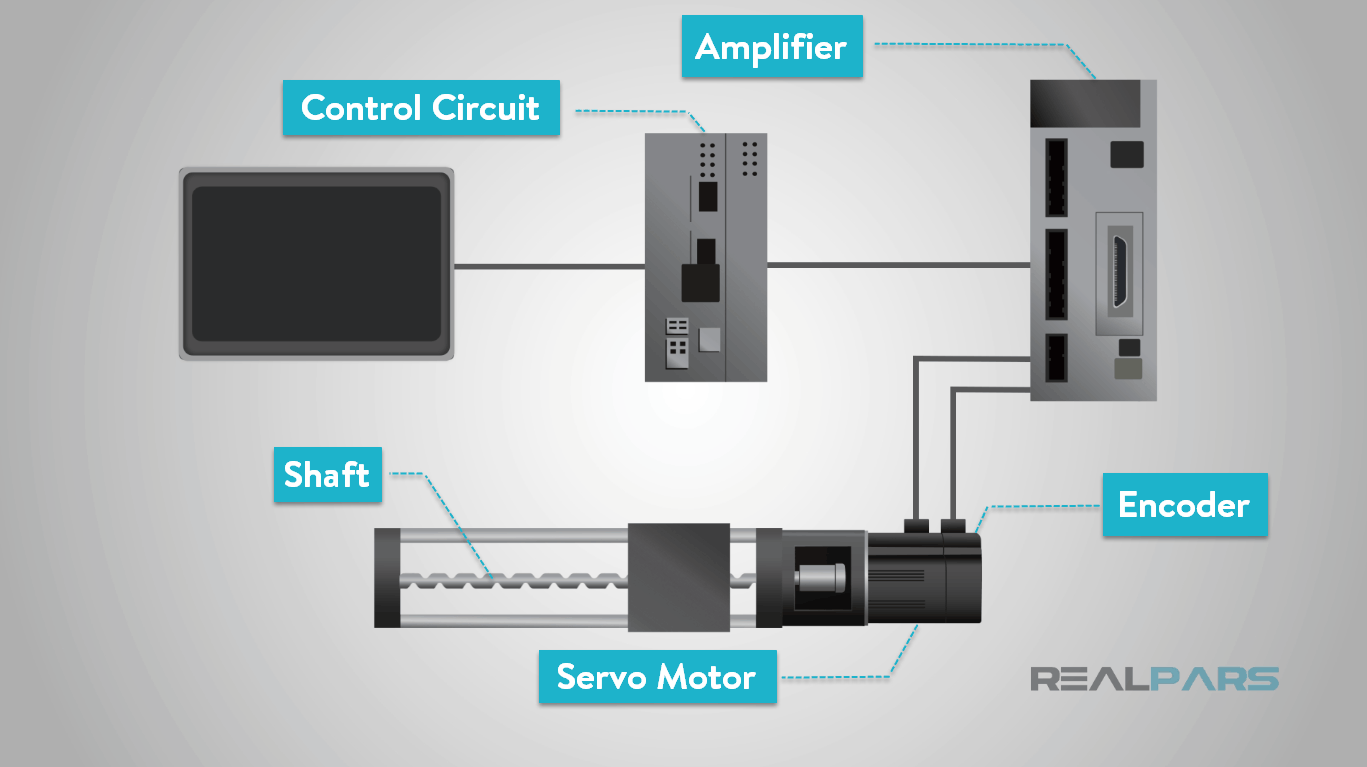
让我们从伺服电机的基础知识开始。伺服电动机是闭环系统的一部分,由几个部分组成,即控制电路,伺服电动机,轴,电位计,驱动齿轮,放大器以及编码器或分解器。
伺服电机是一种独立的电气设备,可以高效且高精度地旋转机器的零件。
该电动机的输出轴可以移动到常规电动机所没有的特定角度,位置和速度。
伺服电动机利用常规电动机,并将其与传感器耦合以提供位置反馈。
控制器是为此专门设计和使用的伺服电机中最重要的部分。
伺服电动机是一种闭环机构,它结合了位置反馈,以便控制旋转或线性速度和位置。
电动机由模拟或数字电信号控制,该电信号确定代表轴的最终指令位置的运动量。
一种编码器用作提供速度和位置反馈的传感器。该电路建立在通常装有齿轮系统的电动机壳体内。
伺服电机类型
伺服电机的类型根据其应用分为不同类型,例如交流伺服电机和直流伺服电机。
评估伺服电机有三个主要考虑因素。首先基于它们的当前类型-交流还是直流,其次基于所使用的换向类型,电动机是否使用电刷,第三种考虑因素是电动机的旋转磁场,转子,旋转是同步还是异步。
让我们讨论第一个伺服因素。交流或直流考虑因素是基于电动机将使用的电流类型的最基本分类。
从性能的角度来看,交流和直流电动机之间的主要区别在于控制速度的继承能力。
对于直流电动机,在恒定负载下,速度与电源电压成正比。
在交流电动机中,速度由施加电压的频率和磁极数确定。
尽管交流和直流电动机都用于伺服系统,但交流电动机会承受更高的电流,并且更常用于伺服系统中,例如与机器人,在线制造以及需要高重复性和高精度的其他工业应用中。
直流伺服电机通过电刷,换向器进行机械换向,或者不使用电刷进行电子换向。
有刷电机通常较便宜且操作更简单,而无刷设计更可靠,效率更高且噪声较小。
换向器是一种旋转式电气开关,可周期性地反转转子和驱动电路之间的电流方向。
它由一个圆柱体组成,该圆柱体由转子上的多个金属接触段组成。两个或更多个由软导电材料(例如碳)制成的称为“电刷”的电触点压在换向器上,并在换向器旋转时与换向器的各部分形成滑动接触。
尽管伺服系统中使用的大多数电动机都是交流无刷设计,但由于其简单性和低成本,有刷永磁电机有时也被用作伺服电机。
伺服应用中最常见的有刷直流电动机是永磁直流电动机。
无刷直流电动机通常通过使用霍尔效应传感器或编码器,用电子方式来实现换向,从而代替物理电刷和换向器。
交流电动机通常是无刷的,尽管有一些设计,例如可以使用交流或直流电源运行的通用电动机,但确实具有电刷并经过机械换向。
最后要考虑的分类是伺服电机应用程序将使用同步还是异步旋转磁场。
尽管通常将直流电动机分为有刷或无刷电动机,但交流电动机通常通过其旋转同步或异步磁场的速度来区分。
如果从AC-DC的角度回想一下,在AC电动机中,速度取决于电源电压的频率和磁极数。
该速度称为同步速度。因此,在同步电动机中,转子以与定子的旋转磁场相同的速度旋转。
但是,在通常被称为感应电动机的异步电动机中,转子的旋转速度比定子的旋转磁场慢。
但是,异步电动机的速度可以利用几种控制方法来改变,例如改变极数,改变频率等。
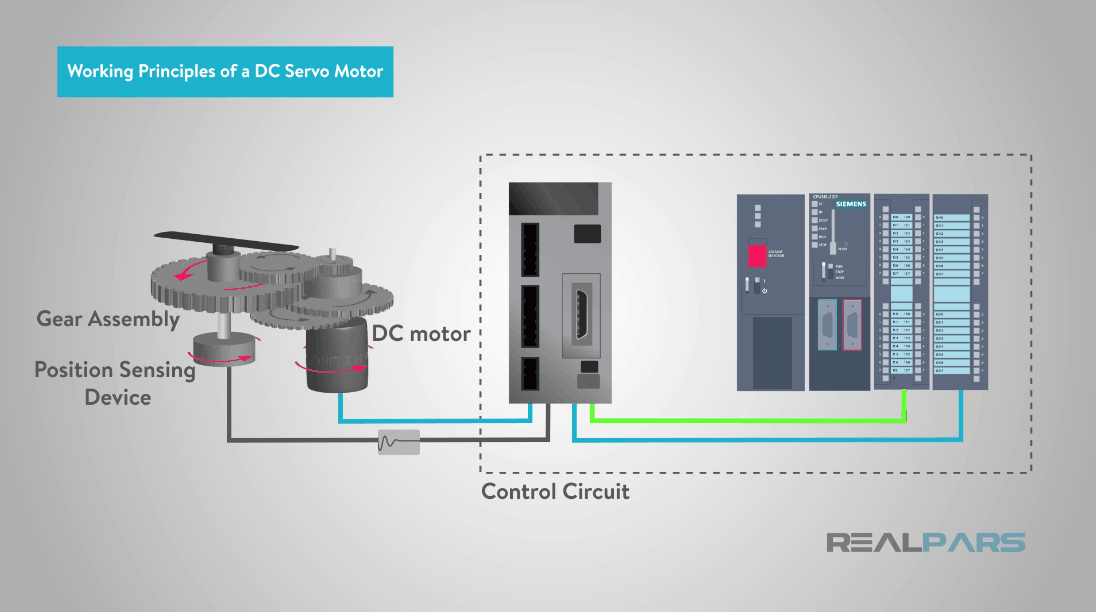
直流伺服电动机的工作原理是四个主要部件的结构,即直流电动机,位置传感装置,齿轮组件和控制电路。
直流电动机的期望转速取决于所施加的电压。
为了控制电动机速度,电位器产生一个电压,该电压作为误差放大器的输入之一施加。
在某些电路中,控制脉冲用于产生与电动机的所需位置或速度相对应的DC参考电压,并将其施加到脉冲宽度电压转换器。
脉冲的长度将施加在误差放大器上的电压确定为所需的电压,以产生所需的速度或位置。
对于数字控制,使用PLC或其他运动控制器生成占空因数的脉冲,以产生更精确的控制。
反馈信号传感器通常是一个电位计,它通过齿轮机构产生与电动机轴的绝对角度相对应的电压。然后,将反馈电压值施加到误差比较器放大器的输入。
放大器将电位器反馈产生的由电动机当前位置产生的电压与产生正或负电压误差的电动机所需位置进行比较。
该误差电压被施加到电动机的电枢。随着误差的增加,施加到电动机电枢的输出电压也会增加。只要存在误差,比较器放大器就会放大误差电压并相应地为电枢供电。
电机旋转直到误差变为零。如果误差为负,则电枢电压反向,因此电枢沿相反方向旋转。
交流伺服电机的工作原理基于具有两种不同类型的交流伺服电机的结构,即同步和异步(感应)。
同步交流伺服电机由定子和转子组成。定子由圆柱框架和定子铁芯组成。
缠绕在定子芯上的电枢线圈和线圈连接到导线,通过导线将电流提供给电动机。
转子由永磁体组成,这与异步感应型转子不同,转子中的电流是由电磁感应的,因此这些类型被称为无刷伺服电机。
当定子磁场被电压激励时,转子以相同的速度或与定子的激励磁场同步地跟随定子的旋转磁场,这就是同步类型的来源。
对于这种永磁转子,不需要转子电流,因此当定子磁场断电并停止时,转子也将停止。这些电动机由于没有转子电流而具有更高的效率。
当需要转子相对于定子的位置时,将编码器放置在转子上,并向伺服电机控制器提供反馈。
异步或感应交流伺服电动机定子由定子铁芯,电枢绕组和导线 组成,转子由轴和转子铁芯绕组组成。
大多数感应电动机包含一个旋转元件,转子或鼠笼。
仅定子绕组带有交流电源。
交流电在定子绕组周围产生交变磁场。该交变磁通场以同步速度旋转。
旋转通量称为旋转磁场(RMF)。定子旋转磁场与转子导体之间的相对速度会根据法拉第电磁感应定律在转子导体中产生感应电磁力。这与在变压器中发生的动作相同。
现在,转子中的感应电流还将在其周围产生交变磁通场。该转子磁通滞后于定子磁通。
转子速度与旋转的定子磁通场有关,并且转子沿与定子磁通相同的方向旋转。
转子不能成功地赶上定子磁通速度或不同步,因此可以推导出异步类型。
伺服电机应用
伺服电机的应用已应用于许多工业和商业系统和产品中,例如机器人技术,在机器人的每个“关节”处都使用伺服电机来执行其精确的运动角度。
相机自动对焦使用内置于相机中的伺服电机,可以精确地校正镜头的位置以锐化失焦的图像。
在天线定位系统中,伺服电机用于定位天线和望远镜的方位角和仰角,例如美国国家射电天文台所使用的定位系统。
TAG 伺服电机
