





T86数字式步进伺服电机驱动器手册
文章来源:锐特步进电机 时间:2019-04-27 18:26:10 浏览:
1.产品概述 2
2.应用环境及安装 3
2.1应用环境要求 3
2.2驱动器安装尺寸 3
3.驱动器端口和接线 4
3.1端口功能说明 4
3.2电源输入 4
3.3 编码器连线 4
3.4 电机连线 5
3.5 控制信号连线 5
3.5.1 PUL、DIR端口 5
3.5.2 ENA端口 5
3.5.3 ALM、Pend端口 5
3.5.4控制信号接线实例 6
3.6 RS232 串口 7
4.拨码及运行参数设置 7
4.1每转脉冲设置 7
4.2电机方向选择 8
4.3脉冲模式选择 8
5.驱动器工作状态LED指示 8
6.常见问题及对策 9
7.可选功能定制型号 9
附录A.调试软件应用说明 10
附录B.保修条款 10
1.产品概述
感谢您选择锐特T系列数字式步进伺服驱动器。

步进伺服,是在普通开环步进电机的基础上,结合位置反馈和伺服算法形成的高速、高扭矩、高精度、低振动、低发热、不丢步的步进伺服方案。
T系列步进伺服驱动器,基于TI公司全新32位DSP处理芯片的平台,利用伺服驱动器中磁场定向(FOC)和矢量弱磁控制算法设计,具有全方位超越普通步进的性能表现。
内置PID参数调节功能,使电机更好的满足不同种类负载的应用;
内置弱磁控制算法,使电机高速时磁场特性减弱,保持动力;
内置电流矢量控制功能,使电机具有伺服的电流特性,发热低;
内置微步指令算法,使电机运行各速度段时保持平稳、低振动;
内置4000pulse分辨率的编码器反馈,使定位精度提高,绝不丢步。
总之,结合步进电机特性的伺服控制方案使得T系列步进伺服驱动器能更好的发挥步进电机的性能,可替代相同功率的伺服应用,是自动化设备最优性价比的新选择。
T86驱动器可通过拨码开关和调试软件设置细分及其他参数,具有电压、电流、位置等保护功能,增添报警输出接口,其输入输出信号均采用光电隔离。
| 供电电源 | 20 - 80 VAC / 24 – 100VDC |
| 控制精度 | 4000 Pulse/r |
| 脉冲模式 | 方向&脉冲、CW/CCW双脉冲、A/B正交脉冲 |
| 电流控制 | 伺服矢量控制算法 |
| 细分设置 | 拨码开关设定,或调试软件设定 |
| 速度范围 | 常规1200~1500rpm,最高4000rpm |
| 共振抑制 | 自动计算共振点,抑制中频振动 |
| PID参数调节 | 调试软件调整电机PID特性 |
| 脉冲滤波 | 2MHz数字信号滤波器 |
| 报警输出 | 过流、过压、位置错误等报警输出 |
希望我们优异性能的产品,可以帮您出色的完成运动控制项目。
在使用本产品前,请先阅读此技术手册。
2.应用环境及安装
2.1应用环境要求
| 项目 | 锐特 T86 |
| 安装环境 | 避免粉尘、油污、腐蚀性环境 |
| 振动 | 0.5G(4.9m/s2) Max |
| 使用温度/湿度 | 0 ℃ ~ 45 ℃ / 90%RH以下(无凝露) |
| 储运温度 | -10 ℃ ~ 70 ℃ |
| 冷却方式 | 自然冷却/远离发热源 |
| 防水等级 | IP54 |
2.2驱动器安装尺寸

安装时请将驱动器采用垂直或水平站立方式,正面朝前、顶部朝上以利散热。
组装时注意避免钻孔屑及其它异物掉落驱动器内部。
安装时请用M3螺丝固定。
安装附近有振动源时(如冲钻床等),请使用振动吸收器或加装防振橡胶垫片。
多台驱动安装于控制柜内时,请注意摆放位置需保留足够的空间,以取得充分的散热;如有需要可配置散热风扇,保证控制柜内良好的散热条件。
3.驱动器端口和接线
3.1端口功能说明
| 功能 | 标号 | 定义 | 备注 |
| 电源输入 | AC | 输入交流电源 |
交流20~80V 直流24~100V |
| AC | 输入交流电源 | ||
| 电机接线 | A+ | A相绕组正端 | 红 |
| A- | A相绕组负端 | 黄 | |
| B+ | B相绕组正端 | 黑 | |
| B- | B相绕组负端 | 绿 | |
| 编码器接线 | EB+ | 编码器B相正端 | 绿 |
| EB- | 编码器B相负端 | 黄 | |
| EA+ | 编码器A相正端 | 棕 | |
| EA- | 编码器A相负端 | 白 | |
| VCC | 编码器工作电源5V正 | 红 | |
| GND | 编码器工作电源5V地 | 蓝 | |
| 脉冲接线 | PUL+ | 脉冲输入接口 | 3.3~24V电平兼容 |
| PUL- | |||
| DIR+ | 方向输入接口 | ||
| DIR- | |||
| 使能端子 | ENA+ | 使能控制接口 | |
| ENA- | |||
| 报警输出 | ALM+ | 报警输出接口 | 24V,40mA以下 |
| ALM- | |||
| 到位输出 | Pend+ | 到位输出接口 | |
| Pend- |
3.2电源输入
驱动器工作电源为交直流通用,输入电压范围为交流20~80V 、直流24V~100V。不要误将市电220VAC直接接到AC两端!!!
电源选择参照:
电压:
步进电机具有随着电机速度升高而力矩下降的特性,而输入电源电压的高低会影响电机高速力矩下降的幅度。适当提高输入电源的电压可以增大电机在高速运行时的输出转矩。
步进伺服具有比普通步进更高的转速和力矩输出,因此,如果期望获得较好的高速性能,则需要提高驱动器的供电电压。
电流:
驱动器工作的过程是将输入的高电压低电流的电源转换成电机绕组两端的低电压高电流。实际使用时,根据电机的型号、负载转矩等因素选用合适的电源。
再生电压的影响:
步进电机在工作时,同样保留发电机的特性。在减速时,负载积累的动能会转化为电能叠加到驱动器电路和输入电源上。使用时应注意加减速时间的设置,以防止驱动器或电源的保护。
在驱动器断电时,拉动负载使电机运动时会看到驱动器LED指示灯亮,也是受此影响。
3.3 编码器连线
T86编码器为A/B差分输出,使用时按照对应顺序连接。| EB+ | EB- | EA+ | EA- | VCC | GND |
| 绿 | 黄 | 棕 | 白 | 红 | 蓝 |
3.4 电机连线
| A+ | 红 | |
| A- | 黄 | |
| B+ | 黑 | |
| B- | 绿 |
3.5 控制信号连线
3.5.1 PUL、DIR端口:用于脉冲指令的连接
标准T系列驱动器信号接口为脉冲形式,T86可以接收三种脉冲指令信号。上位控制器可以是PLC、单片机、控制卡、控制器等脉冲信号发生装置。
| 脉冲&方向(PUL + DIR) | |
| 双脉冲(CW +CCW) | |
| 正交脉冲(A/B 正交脉冲) |
3.5.2 ENA端口:用于使能或禁止
默认光耦关闭时驱动器输出电流给电机;内部光耦导通时,驱动器将切断电机各相的电流使电机处于自由状态,此时步进脉冲不被响应。当电机处于报错状态时,使能自动断开。ENA信号的电平逻辑可以设置为相反。
3.5.3 ALM、Pend端口:用于报警和到位输出
ALM端口用于将驱动器报警状态输出给外部控制电路。当驱动器处于报错状态时,ALM输出跟正常工作时相反的光耦电平。Pend端口用于输出驱动器到位信号。上位机发出的脉冲指令位置和步进伺服电机当前的位置之差(位置偏差)小于设定值时,输出到位信号。上位机接受该信号,确认定位完成。
此外,ALM和Pend端口可以通过软件调节复用为抱闸控制(Break)信号,用于控制带制动器步进伺服电机的抱闸开关。由于制动器线圈属于电感性负载,且电机运行时线圈发热严重,客户可根据需要选配专用刹车控制器,降低制动器发热,提高寿命和可靠性。
锐特公司提供专用刹车控制器的解决方案,示例如下:
|
图中红色圆圈代表开关量负载,一般用于继电器或光耦输入。 使用时注意电源的电压以及限流电阻的使用,以保证驱动器输出口正常工作! |
|
|
图中红色线框代表锐特刹车控制器,可代替一般继电器的应用。 中间继电器及其他的应用参考ALM端口控制,使用时注意电源的电压以及限流电阻的使用,以保证驱动器输出口正常工作! |
3.5.4控制信号接线实例
3.6 RS232 串口
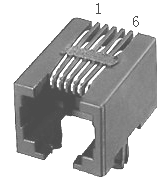 |
序号 | 符 号 | 名 称 |
| 1 | NC | ||
| 2 | +5V | 电源正端 | |
| 3 | TxD | RS232发送端 | |
| 4 | GND | 电源地 | |
| 5 | RxD | RS232接收端 | |
| 6 | NC |
使用时应注意不能带电拔插232串口!!!
4.拨码及运行参数设置
4.1每转脉冲设置
拨码SW1、SW2、SW3、SW4用于设置电机每转所需脉冲个数电机转速 = 指令脉冲频率÷每转脉冲
电机行程 = 指令脉冲数量÷每转脉冲
| 步数/转 | SW1 | SW2 | SW3 | SW4 | 备注 |
| Default | on | on | on | on | 拨码调成Default状态调试软件可自由更改其它细分数 |
| 800 | off | on | on | on | |
| 1600 | on | off | on | on | |
| 3200 | off | off | on | on | |
| 6400 | on | on | off | on | |
| 12800 | off | on | off | on | |
| 25600 | on | off | off | on | |
| 51200 | off | off | off | on | |
| 1000 | on | on | on | off | |
| 2000 | off | on | on | off | |
| 4000 | on | off | on | off | |
| 5000 | off | off | on | off | |
| 8000 | on | on | off | off | |
| 10000 | off | on | off | off | |
| 20000 | on | off | off | off | |
| 40000 | off | off | off | off |
4.2电机方向选择
拨码SW5用于设置电机在初始脉冲下的运行方向。off表示初始脉冲输入时,电机方向为逆时针方向;
on表示初始脉冲输入时,电机方向为顺时针方向。
※初始脉冲为驱动器软件开发时所用调试脉冲,请以电机实际运行方向为参考。
4.3脉冲滤波功能选择
拨码SW6用于设置驱动器是否打开脉冲滤波功能。off表示脉冲滤波功能关闭;
on表示脉冲滤波功能打开。
※脉冲滤波功能为驱动器对输入指令的滤波作用,当滤波功能打开时,驱动器将对输入脉冲指令进行平滑处理,可使得电机运行加减速更柔和,但是这也将造成脉冲指令的一定延迟。
滤波时间设置:滤波功能默认的时间为6.4ms,软件可以更改为25.6ms以下的范围。
4.4脉冲模式选择
拨码SW7用于设置驱动器脉冲指令模式。off表示脉冲+方向(单脉冲)模式;on表示双脉冲模式。
※当需要设置驱动器脉冲模式为A/B 正交脉冲模式时,需在调试软件中将脉冲模式复选功能设置为A/B 正交脉冲模式,并将SW7置为on。
4.5开/闭环选择
拨码SW8用于设置驱动器的控制模式。off表示输入正常的闭环模式;
on表示输入驱动器工作在开环模式下,可用于测试电机。
※以上为拨码开关设置相关参数,其他参数设置参考附录A:调试软件应用说明
5.驱动器工作状态LED指示
| LED 状态 | 驱动器状态 | |
| 绿灯长亮 | 驱动器未使能 | |
| 绿灯闪烁 | 驱动器工作正常 | |
| 1绿、1红 | 驱动器过流 | |
| 1绿、2红 | 驱动器输入电源过压 | |
| 1绿、3红 | 驱动器内部电压出错 | |
| 1绿、4红 | 跟踪误差超限 | |
| 1绿、5红 | 编码器相位异常 | |
6.常见问题及对策
| 现象 | 可能情况 | 解决措施 |
| 电机不转 | 电源灯不亮 | 检查供电电路,正常供电 |
| 电机锁轴但不转 | 脉冲信号弱,信号电流加大至7-16mA | |
| 速度太小 | 选对细分 | |
| 驱动器已保护 | 排除报警,重新上电 | |
| 使能信号问题 | 将使能信号拉高或不接 | |
| 指令脉冲有误 | 检查上位机是否有脉冲输出 | |
| 电机转向错误 | 电机转向相反 | 调整拨码开关SW5 |
| 电机线有断路 | 检查连线是否接触不良 | |
| 电机只有一个方向 | 脉冲模式错误或者DIR端口损坏 | |
| 报警指示灯亮 | 电机线接错 | 检查电机接线 |
| 电机编码器线接错 | 检查编码器线顺序 | |
| 电压过高或过低 | 检查电源 | |
| 位置或速度错误 | 信号受干扰 | 排除干扰、可靠接地 |
| 指令输入有误 | 检查上位机指令,确保正确输出 | |
| 每转脉冲设置错误 | 检查拨码开关状态并接对 | |
| 编码器信号异常 | 更换电机,联系厂家 | |
| 驱动器端子烧坏 | 端子间短路 | 检查电源极性或外部短路情况 |
| 端子间内阻太大 | 检查线与线连接处是否加过量焊锡形成锡团 | |
| 电机报超差 | 加减速时间太短 | 减小指令加速度或加大驱动器滤波参数 |
| 电机扭矩太小 | 选大扭矩电机 | |
| 负载太重 | 检查负载重量和质量,调整机械结构 | |
| 电源电流太小 | 更换合适的供电电源 |
7.可选功能定制型号
为适应不同场合的应用需求,T86派生出相关型号,请客户在订购前加以确认和区分:| 型号 | 功能 |
| T86(标准) | 单脉冲、带宽200K、平滑滤波 |
| T86-CCW | 双脉冲模式(拨码6更改) |
| T86-QEP | 正交脉冲模式(可用于编码器跟随应用,调试软件更改) |
| T86-FOC | 伺服控制模式二(控制算法切换,调试软件更改) |
| T86-IO | IO开关量模式(IO触发定速/定位,派生) |
| T86-PM | 驱动器可编程模式(为客户定制控制程序,派生) |
| T86-485 | 485通讯模式(485通讯应用,派生) |
附录A.调试软件应用说明
详见锐特T系列调试软件-帮助选项附录B.保修条款
B.1保修期18个月对其产品提供从发货之日起一年的质保,在保修期内我司将为产品提供免费的维修服务。
B.2 不属于保修之列
■ 不恰当的接线,如电源极性接反和带电拔插电机引线。
■ 超出电气和环境要求使用。
■ 擅自更改内部器件。
B.3 维修流程
如需维修产品,按下述流程处理:
(1) 与我司客户服务人员联系获得返修许可。
(2) 随货附寄书面的驱动器故障现象说明以及寄件人联系方式和邮寄方式。
邮寄地址:
邮编:
电话:
TAG 步进 电机 驱动器 数字式 T86 伺服

