





伺服电机简介
什么是伺服电机?
伺服电动机(或伺服器)是独立的电气设备,可以高度精确地旋转或推动机器零件。在很多地方都可以找到伺服系统:从玩具到家用电器,再到汽车和飞机。如果您有无线电遥控模型车,飞机或直升机,则至少要使用几个伺服器。在模型汽车或飞机中,伺服器来回移动操纵杆以控制转向或调整机翼表面。通过旋转连接至发动机节气门的轴,伺服器可调节以燃料驱动的汽车或飞机的速度。伺服电机还出现在我们每天使用的设备的幕后。电子设备,例如DVD和Blu-ray Disc TM播放器使用伺服器来伸缩光盘托盘。在21世纪的汽车中,伺服器控制汽车的速度:油门踏板类似于收音机上的音量控制,会发出电信号,告知汽车的计算机被按下的距离。汽车的计算机计算出来自其他传感器的信息和其他数据,然后将信号发送到安装在节气门上的伺服器,以调节发动机转速。商用飞机使用伺服器和相关的液压技术来推动和拉动飞机上的几乎所有物体。
当然,没有伺服器可能就不存在机器人。您几乎在每部电影中都看到了伺服控制的机器人(那些复杂的动画人偶有几十个伺服器),并且您可能已经看到了许多出售的机器人动物玩具。较小的实验室机器人也使用伺服器来移动关节。业余爱好伺服器具有各种形状和尺寸,可用于不同的应用。您可能想要一个大而有力的机器人来移动大型机器人的手臂,或者想要一个使机器人的眉毛上下摆动的小机器人。
伺服电机如何工作?
伺服器的简单性是使它们如此可靠的功能之一。伺服器的心脏是小型直流(DC)电动机,类似于在廉价玩具中可能会发现的那种电动机。这些电机依靠电池供电,并以高RPM(每分钟转数)旋转,但输出的扭矩却非常低(用来做功的扭转力-打开广口瓶时要施加扭矩)。齿轮的布置使电机高速运转并使其减速,同时增加了扭矩。(物理的基本定律:功=力x距离。)微型电动机虽然转矩不大,但是却可以快速旋转(小的力,大的距离)。伺服箱内部的齿轮设计将输出转换为低得多的旋转速度,但扭矩更大(力大,距离小)。实际工作量是相同的,只是更有用。廉价伺服电机中的齿轮通常由塑料制成,以使其更轻,成本更低(请参见下面的图3)。在设计用于提供更大扭矩以进行更重工作的伺服系统上,齿轮由金属制成,并且不易损坏。
如果使用小型直流电动机,则由电池供电,电动机就会旋转。但是,与简单的直流电动机不同,伺服器的旋转电动机轴会随着齿轮减速。最终齿轮上的位置传感器连接到小电路板上。传感器告诉该电路板伺服输出轴旋转了多远。来自计算机或远程控制车辆中的收音机的电子输入信号也馈入该电路板。电路板上的电子设备将信号解码,以确定用户希望伺服器旋转多远。然后,它将所需位置与实际位置进行比较,并确定旋转轴的方向,以使其到达所需位置。
想象您正在和一个朋友在运动场上接球。您站在一端,希望您的朋友出去玩很长的路。您可以不断喊“越来越远”,直到她离您想要的距离为止。但是,如果她出去的距离超出您的投掷范围,则必须喊“更近”,直到她回到正确的位置。如果她只是机械臂上的简单电动机,而您是微处理器,那么您将不得不花一些时间看她所做的事情,并给出命令将其移回到正确的位置(这称为反馈循环)。如果她是伺服电机,则可以说“精确走出4.5米”,然后知道她会找到正确的位置。这就是使伺服电机如此有用的原因:一旦您告诉他们您想要做什么,它们就会在您的帮助下完成工作。伺服电机的这种自动搜索行为使其非常适合许多机器人应用。
伺服电机类型
伺服系统有多种尺寸和三种基本类型:位置旋转,连续旋转和线性。
位置旋转伺服器:这是最常见的伺服电动机类型。输出轴旋转大约半圈,即180度。它在齿轮机构中设有物理挡块,以防止转弯超出这些限制,从而保护旋转传感器。这些常见的伺服器存在于无线电遥控汽车,水上飞机,玩具,机器人以及许多其他应用中。
连续旋转伺服:与普通位置旋转伺服电动机非常相似,不同之处在于它可以无限地沿任一方向旋转。控制信号不是设置伺服器的静态位置,而是解释为旋转的方向和速度。可能的命令范围会导致伺服器根据命令信号按所需的顺时针方向或逆时针方向以不同的速度旋转。如果您将其安装在机器人上,则可以在雷达天线上使用这种类型的伺服器。或者,您也可以在移动机器人上将其用作驱动电机。
线性伺服:这也与上述的位置旋转伺服电机类似,但具有附加齿轮(通常是齿条和小齿轮机构),可将输出从圆形更改为来回。这些伺服器不容易找到,但是有时您可以在业余商店中找到它们,在大型飞机中它们被用作执行器。
选择伺服电机
启动使用伺服器的项目时,请查看您的应用程序要求。伺服器必须从一个位置旋转到另一位置有多快?它要推或拉有多难?我需要位置旋转,连续旋转还是线性伺服?过冲多少是允许的吗?您为伺服系统支付的费用越少,它将需要的机械动力就越少,并且其运动的精度也会越低。您可以多花一些钱,使它可以快速移动,但是它可能没有很多功能。您也可以购买能拉动或推动大负载的设备,但它可能无法快速或精确地移动。制造商的网站和在线爱好指南将提供许多此类信息,您可以用来比较模型。您还会发现业余爱好商店提供多种伺服器,通常可以帮助您确定哪种适合您的项目和预算。
控制伺服电机
伺服伺服器从计算机或无线电发送的一系列脉冲中获取命令。脉冲是从低电压到高电压的过渡,它在短时间内保持高电平,然后又恢复为低电平。在伺服设备之类的电池设备中,“低”被认为是接地或0伏,“高”被认为是电池电压。Servos的工作电压范围通常为4.5至6伏,因此对计算机非常友好。
您是否曾经捡起绑在树上的一根绳子的一端,或者当一位朋友握住另一根绳子时却抓住了跳绳的一端?想象一下,在握住绳索末端的同时,上下移动了手臂。绳索会形成一个巨大的驼峰,从您的一端延伸到另一端。你做的就是施加一个脉冲,然后以波浪的形式在绳索上传播。当您上下举手时,如果您将手放在空中的时间更长,则从侧面观看该实验的人会发现绳索中的脉动会更长或更宽。如果您尽快放下手,脉搏会变短或更窄。这是脉冲宽度。如果您不断向上或向下移动,一串又一组地产生这些脉冲,那么您已经创建了一个脉冲序列。您多久提高和降低一次收益?这是您的脉冲序列的频率,以每秒脉冲数或Hz(“赫兹”的缩写)测量。
注意:计算机中的微处理器使用特殊时钟电路的脉冲来完成工作。您是否听说过计算机速度被称为1.7 GHz(GHz)?这就是说脉冲以每秒17亿个脉冲或1,700,000,000 Hz的速度来表达。想象一下,尝试这么快地移动您的绳索!
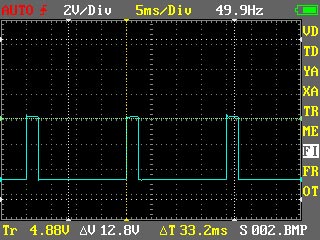
图.您可能会生成一个用于控制伺服器的脉冲序列示例,如从廉价的数字示波器(用于观察电压的仪器)的屏幕截图中所示。在此,每20毫秒或大约50 Hz产生一次脉冲。在此示例中,脉冲宽度约为2毫秒,这将使伺服旋转几乎一直到其旋转的一端。示波器对于测试和调试使用伺服系统的系统非常有用。
伺服必须连接到电源(4.5至6伏),并且控制信号必须来自计算机或其他电路。每个伺服器的要求略有不同,但是对于大多数型号,大约50至60 Hz的脉冲序列(如上所示)效果很好。脉冲宽度将在大约1毫秒到2或3毫秒之间变化(一毫秒是1/1000秒)。诸如Arduino TM之类的流行爱好者计算机都具有用于生成这些脉冲序列的语言的软件命令。但是,可以对任何微控制器进行编程以生成这些波形。基于脉冲宽度传递信息的系统使用脉冲宽度调制 (或PWM),是控制电动机速度和LED亮度以及伺服电动机位置的一种非常常用的方法。
TAG 伺服电机
