





步进电机或伺服电机应该怎么选
每种技术都有其利弊,并且由于为给定应用选择这两种技术都会影响其成功机会,因此对于机器设计人员来说,在考虑技术优势和优势的同时选择最佳的电机驱动系统非常重要。
所有这些都是平衡地利用这些技术来实现给定机器设计所需的过程性能,同时平衡成本与所需机制的功能。
机器设计人员不应以预定的思维来限制步进器或伺服器的利用率,而应了解每种技术在控制特定机械装置和过程中最有效的地方。
步进电机厂家概述了步进技术和伺服技术之间选择标准的不同基准功能。对这些技术的透彻了解将有助于产生最佳,最有效的机电设计,以充分发挥机器的功能。
当今的数字步进电机驱动器使用高级集成电路和简化的编程技术提供了增强的驱动器功能,选件灵活性和通信协议。伺服电机系统也是如此,而更高的转矩密度,改进的电子设备,算法和更高的反馈分辨率已导致更高的系统带宽(BW)功能,以及降低了许多应用的初始和总体运行成本。
步进电机系统概述
步进电机相对于伺服系统具有几个主要优势。它们通常成本较低,具有通用的NEMA安装,提供较低的扭矩选项,所需的布线成本更低,并且其开环运动控制组件使机器集成变得简单,并为最终用户提供了易用性。
扭矩和速度注意事项
在大多数情况下,使用步进还是伺服的问题由应用程序决定。步进器的尺寸通常为其连续要求的两倍,以达到附加的加速和/或减速扭矩能力或所需的峰值扭矩。
相比之下,伺服电机的尺寸通常适合于特定的应用速度和扭矩,以在整个运动过程中实现最大的间歇性加减速,保持扭矩(如果适用)和连续RMS要求。
通常,如果应用需要高通量,高速和高带宽能力来进行干扰校正和/或高转速,并且轴之间的配合紧密或不紧密配合,则伺服电机是最佳选择。如果点对点位置性能和rpm要求适中,则(作为过程负载和预期干扰的函数)步进电机可能是更好的选择。另外,当负载在合理范围内时,步进器保持位置的能力(使用带动力的保持扭矩和不带动力的制动扭矩)可能是一个优势。
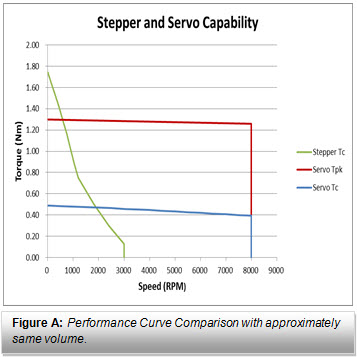
速度-转矩曲线突出了等体积步进电机和交流永磁(PM)伺服电机之间的差异(图A)。步进电机通常以比伺服电机低的速度产生更高的连续转矩。但是,伺服电机在相同的低速范围内会产生间歇性的峰值转矩,而在更大,更高的速度范围内会产生峰值和连续的转矩。
步进系统可以很好地完成用于调整和设置的自动机器轴以及用于检查的视频轴。步进器对于这些类型的轴特别理想,因为它们易于在控制系统中进行设计并且在初始设置时更便宜。当给定设置的轴可以锁定到位时,它们的运行成本会降低(例如,可选的ON / OFF降低功率模式)。此外,在正确应用时,步进器由于其简单的开环控制而较不容易出现故障,该控制仅需要绕组与驱动的匹配,而闭环反馈电路则需要电机与驱动的机械调谐系统。
步进驱动器
新型设计技术通过利用以下功能改善了步进电机的性能:内置反馈,运动结束阻尼(减少建立时间,同时最大限度地提高了精度),软启动(以减少上电时的晃动),反共振模式(用于优化扭矩,稳定性和降噪(可听或其他方式)),空闲电流降低(IRC-用于降低静止状态下的电机发热)以及易于控制的全步,半步和微步操作模式。
尽管最合适尺寸的步进器在选定的步进模式下开环运行极其精确,但是内置反馈可提供更高的精度,而无需外部反馈设备。微步进技术可在低速时实现更平滑的转矩和运动,在高速时实现更高的分辨率,并且步距从全步/半步减小。
现代步进电机的发展
与上一代步进器相比,现代步进器具有更高的额定功率。较新的设计技术已导致较小的气隙,更坚固的磁体,物理上更大的磁体以及转子尺寸过大。转子直径的增加会在单位体积上产生更多的扭矩。对于此技术,在增加转子直径和惯性的同时,步进电机的物理框架尺寸和绕组保持不变。当然,对于给定的应用,较大的转子惯性会影响加减速时间。但是这种方法通过有效降低负载(J_load)与电机转子(Jm)惯性之比,为给定的步进框架尺寸提供了更多应用。通常,步进电机系统的J_load:Jm尺寸小于30:1,但加速和减速速度较慢,并且先进的微步进操作,
现在,在现代步进驱动器中可以通过电子方式处理失速检测,由于组件未对准,噪声和/或丢失的脉冲(位置)信息,可选的反馈设备通常用于位置校正。取决于步进驱动器,具有反馈功能的步进电机将比等效的开环等效电机具有更低的速度波动和更少的功率,并且在低速运行时将具有等效的三相伺服电机更高的残余转矩。因此,由于需要反馈的步进电机应用可能会接近伺服系统的成本,而在一种应用中可能具有操作优势,而在另一种应用中可能会带来不利影响,因此设计人员必须对要执行的工作有所了解。从技术上讲,闭环步进系统无法与价格较低的伺服电机系统竞争。
伺服电机系统概述
伺服电机相对于步进电机具有几个明显的优势。它们可以根据需要在很宽的转速范围内产生高扭矩,并且可以在更宽的扭矩范围和更高的电压(最高480 Vac)中使用。它们以比其连续能力大得多的扭矩来响应扰动,并且仅使用完成指令运动所需的功率并且紧凑。
伺服驱动器
电机驱动补偿通常被称为调整或补偿,曾经被认为是伺服用户的祸根,在很大程度上,它是历史。如今,最新的数字伺服驱动器技术已增强了软件和硬件功能,以改善用户体验并提供出色的补偿灵活性。实际上,某些伺服系统会自动配置电机,驱动器和反馈,并进行自我调整。自行调整的伺服驱动器会自动适应给定的电机构,而不会降低性能,并且几乎不需要对控制回路进行进一步的微调。
扭矩和速度注意事项
尽管伺服电机被设计为可以高速运行,但是在适当的控制下,即使在低至1 rpm或更低的转速下,它们也可以在极低的速度下精确运行。如果使用得当,步进机是准确的,通常对于低速应用(小于1,000 rpm)是更经济的解决方案。但是,在1,000 rpm以上时,步进电路的转矩开始下降,这是磁路时间常数和铁芯损耗的结果。
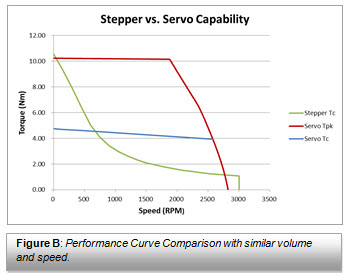
相反,具有可比扭矩的伺服电机直到大约2000至4,000 rpm或更高时才开始下降(图B)。驱动高惯性负载的直接驱动伺服应用通常使用<1000 rpm的速度找到,而具有机械优势的传动系统的典型伺服应用则可能会在其能力范围内使用任何速度找到。
在1,000至3,000 rpm的要求转速范围内,应使用的电机类型取决于功率,转速峰值转矩,连续(RMS)转矩和可重复性等应用要求。
在失速(低速<50步/秒或15 rpm)下或保持负载不动时,对于给定的机架尺寸,步进电机(尤其是超大型转子)比伺服电机可产生更大的转矩(尽管新型伺服电机的设计正在侵入在此)。所有这些扭矩使步进电机可以产生极其精确和刚性的低速运动,而没有齿轮箱或其他机械优势。
相反,具有更高极数和高分辨率反馈的Direct Drive伺服电机通常用于工业过程应用,这些应用要求典型速度小于1000 rpm,而没有机械优势,例如齿轮箱。
步进电机处于静止状态时,它会消耗连续的能量,并且绝对不会运动(除非过载),并且在不通电时,其定位扭矩功能可用于保持位置。
相比之下,由于不断进行闭环误差校正,因此在开启时伺服电机永远不会静止,而仅使用维持其指令位置所需的能量。不断变化的位置环误差会导致伺服器的输出轴来回移动(尽管应该不会引起注意),同时不断寻找最小的误差。这种连续的来回执行器运动称为抖动(类似于另一个术语,抖动),是故意引起的执行器运动(例如,用于持续克服静摩擦问题的阀门)。相对于总分辨率,搜索过程中的物理位移通常仅涉及少数反馈计数:在大多数应用中不明显的情况在其他应用中可能是不可接受的(高分辨率反馈设备会减小典型的搜索变化量)。
在重复性和分辨率是一个问题的地方,传统上是伺服电机领域,现在可以考虑使用步进器。对于步进电机,要求的是负载必须是可预测的,或者仅承受很小的外力和干扰,而无需轴之间的紧密配合。步进电机开环运行,与同类伺服解决方案相比,可以节省20-30%以上的初始机器成本。
扭矩表现
关于转矩,设计人员应从可比较的速度转矩曲线中选择能够在所需速度下提供更高值的电机。以相同的价格,大多数设计师更喜欢使用伺服电机。对于恒定或可变负载,伺服系统可以从步进系统无法达到的过载状态中恢复。步进电机在小于1,000 rpm的小包装中会产生很大的扭矩。相比之下,伺服电机可以处理低于和高于1,000 rpm的扭矩要求。
惯性匹配
确定系统的负载惯量有助于技术选择。根据经验,步进电机通常不会超过负载惯量与电机惯量的30:1的比率(J_load:Jm)。相比之下,具有高分辨率反馈且没有顺从性的直接驱动伺服系统(从动钢除外)可以运行200-300:1(J_load:Jm比率)或更高,并且响应时间比以前的反馈技术快。
过去,典型的伺服电机系统需要快速的响应时间以及较高的加速和/或减速度,要求负载与转子的惯性比在1:1至5:1的范围内,后来又变为1:1至8的范围。 -10:1。
如今,具有最高可用反馈分辨率,最小顺应性和/或反冲力的伺服系统可在许多应用中获得1-15:1和更高的惯性比。这些提供最佳的运营效率,几乎没有额外的风险。更高的惯性比越来越取决于应用,不仅相对于所需的机器规格,而且还与机构的柔顺性和间隙有关。对于直接驱动系统,所需的刚度通常需要更大的轴和轴承,甚至还需要保持电机的机器固定装置/支架的顺从性。
轴的协调
要求轴之间协调的应用可以从伺服控制系统中受益,因为它们具有紧密的同步性和高带宽功能,可以快速纠正信号干扰和/或命令更改。尺寸合适的开环步进电机系统将保持同步,而无需任何确认反馈,但仅限于点对点移动,并且只能在命令轴之间进行顺序或伪协调。
布线和电机驱动调整
改善伺服器可靠性和维护性的一项变化是减少了电源和反馈设备之间所需的电线数量。
制造商已经从闭环系统的伺服调整(电机驱动机械补偿)和确定系统何时需要维护中摆脱了很多猜测。自动化或计算的调整技术以及内置的诊断程序可帮助用户简化此要求。此外,大多数伺服驱动器都可以使用传统的步进和方向输入,这些输入已用于与步进器接口多年。利用此功能的伺服系统处于位置模式,可消除潜在的损耗或增加指令的电机步进。
这使我们面临步进电机系统最常见的问题之一,即在其功能极限下运行,运动步距的损失和/或增加(相对于命令步数)。在加速和/或减速期间,该问题最明显。步长的损失通常是由于惯性过大(影响加速度)或摩擦力超出预期所致。相反,步长的增加通常是由于噪声或惯性过大(影响减速)而引起的。由于附加的(+)和损耗(-)运动步骤的累积,可能需要数小时才能超出某些制造公差。
尽管如此,步进电机仍然更简单,只需更少的电线即可连接,只需进行最少的电机驱动调整即可启动系统并运行。
精度和分辨率
步进系统在理论分辨率和实际分辨率之间存在差异。例如,两相,全步距,1.8°步进角电机在一转(360°/ 1.8°)中可能有200个可能的位置,但是能否实现取决于应用的电机尺寸。半步进和微步进电机驱动模式也是如此。尽管指定为每个完整步长有十个微步长,但一个1.8°的微步长器不一定能在0.18°内找到任何位置。
此外,在积累足够的扭矩来克服摩擦和负载惯性之前,可能需要执行几个命令的微步。在现实世界中,电机可能会轻易跳出所命令的数量一个或多个微步,并稳定在那里。当定位分辨率要求每转必须超过200步时,步进器可以利用反馈编码器实现高达1000步/转的速度。五相电机和微步进电机(请注意)也可以改善步进/转速。
伺服电机的分辨率理论上是无限的,但是在闭环运行中,系统定位主要取决于反馈设备的分辨率,无论是正弦编码器,旋转变压器还是数字(TTL)型编码器。当今的高分辨率反馈设备每电机转数可达到221 [2,097,152]至228 [268,435,456]之间,加上可选的多匝能力(通常高达4096匝)。具有多转功能的反馈设备可用于机器加电时的轴绝对位置,从而消除了初始的轴加电归位循环。
重复性
伺服电机具有很高的可重复性,因为它们运行于闭环状态。但是步进器在许多应用中都可以重复使用,尤其是在单向运行时。但是,当使用空闲电流减少(ICR)模式和/或负载增加时(例如,在方向反转期间)并且超过步进器的能力,情况就会改变。类似于变速箱必须承受的间隙,步进器必须赶上系统命令。在新方向的第一次移动中,由于步进电机克服了惯性和摩擦力(负载的影响),因此会影响电机的精度。一旦发生这种情况,系统将恢复其指定的可重复性,但它可能已经失去或获得了超过所命令的实际位置步长。
输入功率
步进电机等效于带有电阻的电感器,因此,产生转矩的电流需要一定的时间才能上升。这一次限制了给定电压的速度,因此在给定应用中提高电机的速度可能需要更高的电压。
伺服系统的工作原理类似,但是在其能力范围内,驱动器的控制回路将向伺服电机提供所需的电压和电流,以满足负载相对于其命令和反馈误差的需求。相反,当伺服电机系统由于某种原因被迫(无论出于何种原因)在其工作范围之外工作时,即使持续一毫秒,它也不再处于控制之下,因此无法作为伺服器工作。
结论
两种技术都是当今机电一体化机器设计的明确选择。但是,一旦清楚地理解了伺服和步进电机系统的优缺点,尤其是相对于要执行的过程或工作,对于给定应用的最佳选择就变得更加清晰。
假设可以用步进或伺服电机解决方案来完成所需的过程,并具有可重复性,准确性和灵活性要求,以满足当前和未来的需求,剩下的考虑因素可能是环境,预期寿命,工作噪音和/或能源利用率。
当特定要求允许使用任何一种技术时,应利用洞察力和远见卓识,对要考虑的工作流程或要执行的工作,可能的未来需求以及设计者的机器经验具有特定的了解。
TAG 伺服电机 步进电机 步进驱动器 伺服驱动器
