





如何选择合适的电机尺寸
正确选择尺寸是选择电机的关键。如果电动机尺寸过小,它将无法控制负载,从而导致超调和振铃。如果电动机尺寸过大,它可能会控制负载,但也会更大,更重,并且在价格和运营成本方面也会更加高。大家都愿意适当调整尺寸,供应商只是接到电话,要求提供一定功率的电动机。工程师可能只是在购买与先前平台尺寸相同的电动机。他们可能增加了很大的安全余量来补偿变化。他们可能使用了10:1或5:1的负载和惯性与电机惯性之比……或以上所述的某种混合。
这些方法充其量只会导致金钱的浪费。在最坏的情况下,它们会导致草率的系统无法达到预期的性能,从而导致产品质量不合格,停机时间增加和生产率降低。目标是指定一种电动机,该电动机提供将负载定位在指定位置和所需时间所需的速度,加速度和扭矩。它可能包括一个安全余量,旨在补偿两个电动机的变化或机器运行状况的预期变化。但是,应在知情的计算基础上增加安全裕度。
准确地确定尺寸是一个关键过程,需要了解机械系统,操作参数以及设备使用环境的详细信息。尽管存在许多更好的应用程序,但希望能够完成该过程。
从惯性开始
惯性(物体抵抗加速度变化的趋势)是运动控制的主要挑战之一。“惯性不是我们在运动控制领域的朋友,特别是在运动周期短但速度非常快的装配机器上。” Paul Bobel,三菱电气自动化公司变频器高级产品工程师(伊利诺伊州弗农希尔斯)。电机需要能够施加足够的力(在线性系统中)或扭矩(在旋转系统中)以改变负载的加速度,并以可控的方式进行。
为了有效地确定电动机的尺寸,我们需要计算负载惯量(J L)。为了本文的目的,我们将重点放在旋转运动上,尽管可以对线性运动进行类似的计算。旋转质量具有惯性矩,这说明了惯性矩抵抗施加扭矩的趋势。惯性矩J的最简单闭合形式表示为
J = mr ^ 2
它描述了距旋转轴一定距离r的点质量m的惯性矩。该简单表达式用于建立各种复杂形状的惯性矩,例如圆柱体,空心圆柱体,轴上的圆盘,球体,块等。
负载惯量J L应该更恰当地称为反射惯量(J R),因为惯性从负载及其之间的所有组件反射回电机轴。它应包括系统中电动机将负责移动的任何其他机械元件,例如丝杠,皮带轮,皮带,联轴器等。系统对性能的要求越高,该分析就应该越详细。例如,丝杠的转动惯量不同于简单气缸的转动惯量,它的转速足够高,这种区别会影响机器的性能。
为这些复杂的机械系统确定适当的分析表达式并计算质量和位置可能非常具有挑战性。另外,这些计算需要基于重量(由于重力而引起的加速度),而不是简单的质量。此外,电动机的选型过程还需要总的系统惯性,包括J L和电动机惯性J M(基本上是转子的惯性)。
它很容易成为一个艰巨的过程。“通常,人员包括实际负载,齿轮箱和电动机,而皮带,皮带轮和其他机械零件则不在考虑之列,” Bobel说。“他们只是移动到下一个主要尺寸,或者使用相同的框架尺寸,但是会产生更大的扭矩。这就是整个10%超大型方法的来源。”
负载惯量与电机惯量的比例 (基本上,转子惯性)给出的马达可以如何有效地控制负载的度量。高惯量比表示系统将难以控制负载。较低的惯性比(例如4:1或1:1)表明电机将在控制负载方面做得非常有效,但是这也表明电机对于系统而言可能尺寸过大,表示成本,尺寸和重量都会增加超过必要。也就是说,没有绝对值。
“当您开始涉足高性能机器时,如果机械性能良好,这些经验法则就无济于事了,” Bobel说。“我们在伺服和运动控制中所做的惯性失配要大得多– 40:1、60:1。最新的自动调谐驱动器可以非常有效地补偿机器的共振和振动,即使在非常高的速度下也能提供精确的性能,这取决于机器设计和系统的优化程度。
柔顺性(挠曲性)是要考虑的重要因素。如果系统中的松动和柔韧性过大,即使电动机的惯性比为1:1,也将难以控制负载。根据情况,可能需要拧紧机械系统,或者可能需要放松机器的操作参数。
变速箱是管理惯性的重要工具。变速箱通过齿轮比的平方减小惯性。权衡的是,变速箱也会降低电机速度。这对于步进电机可能是个问题,步进电机通常仅以几百RPM的速度运行。大多数伺服电动机的运行速度在2000 RPM和6000 RPM之间,即使与高减速比齿轮箱一起使用,也能使它们以有用的速度运行。
添加应用程序要求
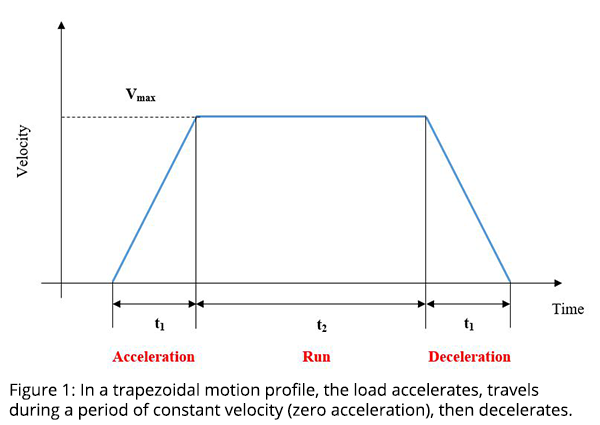
获得系统惯性后,就该考虑应用程序的操作参数并使用它们来确定扭矩了。首先定义负载的运动曲线。运动配置文件因应用程序而异。最基本的形式是梯形的形式:一段加速时间,然后是恒定速度,再一段减速时间(见图)。加速度和减速度(仅是负加速度)可以使用
A = V /吨
图中所示的运动曲线显示对称的加速度和减速度。结果,加速度可以表示为:
a = Vmax / t 1
- a = V max / t 1
扭矩要求
现在我们已经计算了负载惯性以及所需的加速度和减速度,我们可以确定定位负载所需的扭矩量。总扭矩T T 是加速扭矩(T acc)和称为负载扭矩(T L)的量之和。负载扭矩只是系统中机械损耗的总和,通常是摩擦和重力。与惯性一样,它根据形状,质量和配置而变化。
摩擦是电机选型过程中容易忘记的因素。任何两个滑动在一起的表面将抵消施加的扭矩。对摩擦力的标准表达˚F由下式给出
F = µ N
其中,μ等于任何移动元件的滑动表面的摩擦系数,N等于施加到该元件的法向力。该表达式可以用于估计摩擦力,或者可以使用诸如扭矩扳手的测量仪器。
我们可以将加速扭矩T acc定义为
T acc = J T(a)+ T L
其中J T 是总惯量(负载加电动机)。
停止负载所需的减速扭矩类似地由
T dec = J T(-a)+ T L
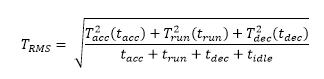
我们还需要考虑在整个运行阶段保持负载恒定速度的运行转矩T run,以及在运动结束时短暂的空闲时间跨度。我们将这些量结合在一起,以确定电机所需的RMS转矩(TRMS)。该表达式由
这是应用程序从电动机所需的扭矩。
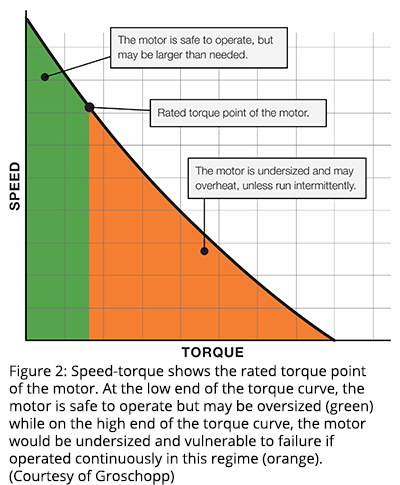
速度-转矩曲线
仅找到具有适当转矩的电动机是不够的。需要对它进行额定以要求的速度使用。制造商提供了电动机的速度转矩曲线,以描述其在整个工作速度范围内的性能。这些数据图为确定电动机是否适合应用条件提供了方便的参考。
基础设施和环境
电机不能在真空中运行。整个选型过程中的基本考虑因素应该是电源的电压和频率特性。还应考虑环境条件。电机会暴露在极端温度下吗?在极冷的情况下,润滑剂变得更粘。当温度骤降时,由于润滑剂的抵抗性,通常在系统中正常运转的电动机可能会失速,因此请相应选择尺寸。
水分和污染同样可能成为问题。考虑是否需要IP等级的设备-并确保选择正确表示操作条件的级别。
物理尺寸
尽管增加电动机功率可以提高其有效控制负载的能力,但实际存在实际限制。在某些情况下,根本没有空间容纳所需框架尺寸的电动机。如果主要问题是直径,则某些电动机制造商会通过在设计中堆叠更多的铁磁叠片来增加给定框架尺寸的输出功率。电机以更长但不一定更宽为代价产生更多的功率。
但是,即使这种方法也有局限性。超过某一点后,系统设计人员需要降低速度要求或重新设计机械系统,以适合更大的电动机。
步进电机的细微差别步进电机的
尺寸调整需要特别考虑。步进电机的极数设计很高-大约50或更多。结果,可以命令它们以不连续的步长而不是连续运动的方式前进。这使它们可以在许多应用中开环运行。在这种模式下,它们既便宜又有效。当电动机处于超转矩模式并失速时,就会出现问题。因为没有反馈设备监视电机轴,所以这种行为可能无法检测到。
结果,尺寸过大成为规则。“从历史上看,人们在选择步进电机时会做两倍的事情,”施耐德电气美国公司(康涅狄格州马尔堡)的Flex中心经理Clark Hummel说。如果他们认为他们需要X的扭矩来完成他们需要做的工作,他们将获得一倍于此的电动机。鉴于步进电机的价格低廉-大约比步进电机低一个数量级,因此特别具有吸引力。
如今,对于正确的应用,运行步进电机闭环裕量可兼得两全。正确选择尺寸所节省的钱可用于编码器。他说:“明智地选择尺寸,您将回到伺服器世界,在伺服器世界中,电机将出现变化。” “您想给自己15%到20%的安全裕度,以补偿出厂时电动机的变化或过程中的变化,但这使尺寸更接近于伺服电动机。”
超越基础
一旦确定了基本尺寸,经验丰富的运动工程师可以采用多种技术来减小电机的尺寸和成本。首先是添加齿轮减速器,如上所述。所使用的变速箱类型也可以降低电动机需求。例如,蜗轮蜗杆箱的效率只有大约30%,而行星齿轮箱的效率大约是85%。这种替代可以潜在地减少电动机上的负载。折衷方案是较高的成本,但是,这可能会降低使用较小电动机的成本效益。
步进电机在低速时比伺服电机固有地提供更大的扭矩。对于低速运行的应用,步进电机可以提供更经济的解决方案。“如果您不需要速度,则可以在较低速度下在相同的包络中获得更高的扭矩,因此在使用步进电机而不是伺服电机的正确应用中有很多优势,” Hummel说。“对于给定的机架尺寸,您可能不需要添加齿轮箱,这是巨大的成本差异。”
电机和电机驱动器指定为两种模式:连续工作模式和峰值或过载模式。电动机驱动器组合可以在短暂的时间间隔内以峰值转矩/电流运行,而不会损坏驱动电子装置的电动机绕组。一个常见的错误是选择具有连续转矩的电动机,该电动机的转矩等于应用的最大转矩要求(通常在极端加速/减速期间看到)。运动控制应用程序通常包括简短,快速的动作。要选择额定连续产生此转矩的电动机,实际上意味着要支付比必要更多的电动机。
如果在规定的时间间隔内进行移动,则电动机可以在过载模式下执行它们。“人们不使用电动机的过载能力来实现这些高加速/减速,” Bobel说。“当一次100%的电流峰值仅一次发生几毫秒时,他们可能最终将电动机的大小定为100%。相反,他们可能利用过载能力或驱动器和电动机的扩展能力来克服这些峰值。这种方法可以使用整体较小的电动机,不仅减小了物理尺寸,而且减小了电动机和驱动器的成本和能耗。
尽管这是一种有效的设计技术,但必须密切注意占空比。峰值电流汲取的间隔必须足够短才能落在规格范围内,而且还必须以足够低的频率发生,以使电机绕组和电子器件冷却下来。从齿轮的角度考虑占空比也很重要,以防止齿轮箱过早意识到故障。
与工程中的所有事物一样,电动机的尺寸确定涉及平衡相互矛盾的需求。Groschopp(爱荷华州苏福克斯市)的销售和市场经理Ed Tullar说:“一切都需要权衡。”您可以进行效率交易,然后损失自己的反扭矩,获得反扭矩,然后又损失功率。最好的方法是尽可能多地确定应用程序。使用可用的大小调整工具简化计算。与您的供应商共享详细信息。他们可以帮助您缩小潜在候选人的范围,并可能将您引导到仍然可以满足您需求的更经济的系统。
TAG 电机尺寸
