可变磁阻步进电机的工作
文章来源:锐特步进电机 时间:2019-11-06 14:29:54 浏览:
下面显示了一个四相或(4/2极)单堆可变磁阻步进电机。这里,(4/2极)表示定子具有四个极,而转子具有两个极。
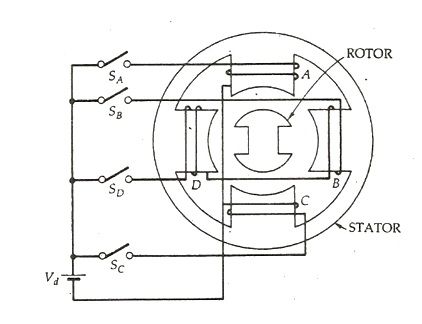
如上图所示,四个相A,B,C和D分别借助于半导体,开关S A,S B,S C 和S D连接到直流电源。定子的相绕组按顺序A,B,C,D,A通电。当绕组A通电时,转子将自己与A相轴对齐。转子在此位置稳定,直到A相断电后才能移动。
现在,B相被励磁,A相断开。转子沿顺时针方向移动90度,以与沿B相轴产生的气隙磁场对齐。类似地,C相通电,B相断开,转子再次以90度运动以对齐本身与相位轴
因此,由于按A,B,C,D,A的顺序励磁,转子在每个过渡步沿顺时针方向移动了90度。转子分四步完成一圈。旋转的方向取决于切换相位的顺序,而不取决于流过相位的电流的方向。因此,可以通过更改相序(如A,D,C,B,A)来反转方向。
可变磁阻电动机的步距角的大小为