





步进电机的微步进-直线运动技巧
微步进是一种控制步进电机的方法,通常用于在低速下实现更高的分辨率或更平稳的运动。
步进电机以不连续的步幅或几分之一转的速度运动。例如,步进角为1.8度的步进电机每旋转一整圈(360÷1.8)将产生200步。这种离散的运动意味着电动机的旋转并不完全平滑,并且旋转速度越慢,由于相对较大的步长,旋转就越不平滑。缓解低速时缺乏平滑性的一种方法是减小电机步距的大小。这是微步进来的地方。
微步控制将每个完整步分成较小的步,以帮助平滑电动机的旋转,尤其是在低速情况下。例如,一个1.8度的步幅最多可划分256次,从而提供0.007度(1.8÷256)的步距角,即每转51,200微步。
通过使用脉宽调制(PWM)电压来控制流向电机绕组的电流,可以实现微步进。驱动器向电机绕组发送两个相位相差90度的正弦电压波。当一个绕组中的电流增加时,另一绕组中的电流则减小。与全步或半步控制相比,这种电流的逐渐传递可导致 运动更平稳,并且产生的扭矩更一致。
微步进可显着减少定位振荡。
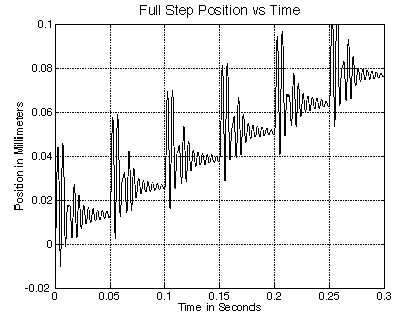
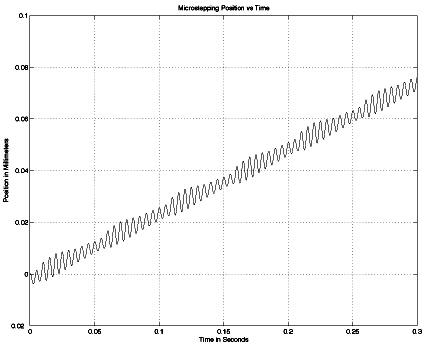
图片来源:Dover Motion
微步进还可减少速度波动。
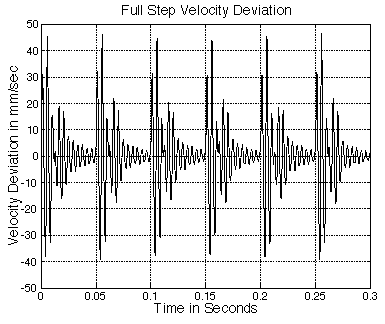
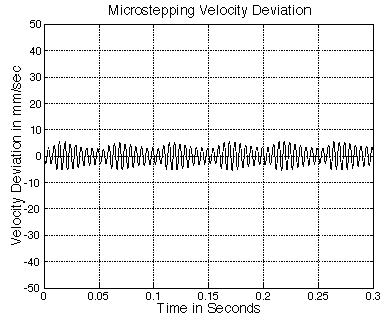
图片来源:Dover Motion
尽管微步控制改善了扭矩产生,低速运动和共振,但控制和电机设计的局限性阻止了它们达到理想的性能。这主要是因为微步进驱动器只能近似一个真正的正弦波,因此尽管与全步进和半步进模式相比,每个步进都大大减小了,但仍存在一些转矩脉动,共振和噪声。此外,具有微步控制的步进电机产生的扭矩仅约为全步控制产生的扭矩的70%。
微步进有时被认为是机械齿轮的一个很好的选择,因为它不会在系统中引入反冲或降低系统的最大速度。但是,机械齿轮使来自电动机的扭矩倍增,并提高了其位置保持能力。
重要的是要避免有时称为“空分辨率”的情况,因为在这种情况下,步骤的划分级别(即分辨率)要高于系统约束的实际水平。当微步产生的扭矩不足以克服被驱动部件(例如丝杠或滚珠丝杠)的摩擦扭矩时,通常会发生这种情况。每微步的增量扭矩由以下公式确定:

T INC =每个微步产生的增量扭矩
T HFS =保持扭矩(全步运行)
SDR =分步比(每整步的微步数)
对于使用256步分比(SDR)的0.35 Nm保持转矩的电动机,每个微步所产生的增量转矩将为0.002 Nm。

如果螺钉的摩擦扭矩为0.06 Nm,则将花费30微步(0.06÷0.002)产生足够的扭矩来使螺钉移动。另外,每转更多的步数运行需要更高的频率来驱动电机的脉冲序列。在前面的示例中使用256 SDR意味着电机每转需要51,200步或脉冲(每转200整步x每步256微步)。在100 rps(6000 rpm)的电动机速度下,所需的脉冲频率大于5 MHz。
TAG 微步进
