





谈一谈惯量与电机选型、驱动控制之间的那些事
搞运动控制,就不能不提祖师爷“牛顿”。
今天的内容,就从中学物理课的牛顿定律开始说起。
根据牛顿第一定律,任何物体都要保持匀速直线运动或静止状态,直到外力迫使它改变运动状态为止。这种物体保持静止状态或匀速直线运动状态的性质,称为惯性。
惯量
根据牛顿第一定律,任何物体都要保持匀速直线运动或静止状态,直到外力迫使它改变运动状态为止。这种物体保持静止状态或匀速直线运动状态的性质,称为惯性。
同样对于旋转绕轴转动的刚体,回转物体也有保持其匀速圆周运动或静止的特性。
物质(物体)运动的惯性量值中,质量是对物体直线运动时惯性大小的量度;而转动惯量是刚体绕轴转动时惯性的量度。
我们统称它们为“惯量 Inertia”。
对于直线运动的物体,其惯量即为质量;而对于回转运动的物体,其惯量为:
I = m r2
式中 m 表示刚体的某个质元的质量,r 表示该质元到转轴的垂直距离。
与力和转矩的关系
惯性是物体的一种固有属性,表现为物体对其运动状态变化的一种阻抗程度,当作用在物体上的外力为零时,惯性表现为物体保持其运动状态不变,即保持静止、匀速直线运动或匀速圆周运动;当作用在物体上的外力不为零时,惯性表现为外力改变物体运动状态的难易程度。
这就是祖师爷的牛顿第二定律:物体加速度的大小跟作用力成正比,跟物体的质量成反比,且与物体质量的倒数成正比;加速度的方向跟作用力的方向相同。用公式表达为:
F = m a
F:力(N)
m:质量(kg)
a:加速度(m/s2)
上述表述是关于直线运动的,对于旋转绕轴转动的刚体也有类似的表述:回转物体的角加速度的大小跟作用转矩成正比,跟回转物体的转动惯量成反比,且与回转物体转动惯量的倒数成正比;角加速度的方向跟作用转矩的方向相同。用公式表达为:
M = I β
M:转矩(Nm)
I :转动惯量(kg · m2)
β:加速度(1/s2)
惯量与系统设计选型
从上面可以看到,在选择运动系统动力源时,要计算所需旋转电机的扭矩或直线电机的出力时,除了要了解运动速度特性,也必须掌握每个运动轴的的惯性量值。不能准确把握惯量大小,将直接导致选型设计错误。小了,系统运行无法达到运动速度特性要求,影响性能;大了,从电机到驱动、再到整个配电系统都得放大,将导致系统各方面成本的增加。可见把握运动系统惯量对于设备的性价比的重要性。
对于机电设备中的运动和传动控制系统来说,对惯量的考量必须落实到每个运动轴的整个传动链,包括:
被驱动的运动负载;
机械传动机构,大到减速机、齿轮齿条,小到丝杠、联轴器、带轮等等;
动力源自身惯量,比如:电机转子惯量和直线电机动子滑块质量。
所以,设备运控系统的惯量计算是一项相当复杂的工作,一方面,传动链中各个不同类型的部件惯量的计算工作量巨大,原因很简单,元件数量繁多,且往往结构复杂;另一方面,目前大部分机械动力传动系统为串联的链式分布,需要不断将被驱动侧的惯量转换映射到动力侧并加以叠加,这种转换映射有时需要考虑到速比的影响,有时需要考虑从直线运动到旋转运动传递关系。总之一句话,机械惯量计算很是费劲,很难。传动链的惯量精准计算的复杂性和高难度,已经成为打造高性价比运控设备的诸多难点之一。所谓魔鬼都在细节中,真正能在这方面将性能做到极致的设备并不多。
尽管困难,但这是件正确的事情,非常必要;非但不能马虎和忽略,而且要加倍细致、精心计算,因为在设备系统惯量计算上投入越多,越有助于设备性价比的提升,是非常值得的。换句话说,要打造高性价比运控设备,我们基本上是无法绕过系统惯量计算这一关的。
惯量与驱动控制
上面我们了解了“惯量”对于运控系统动力源(尤其是电机)选型的重要性。
那是不是说这惯量就都是机械的事儿了呢?
接下来就来说说这运动控制中的惯量对于咱们电气驱动有多重要。
如果我们对驱动控制环有所了解,就不难在控制环各个当量之间的运算关系中发现一些比较有意思的现象。这个现象和各个当量之间传递系数的单位转换有关。
废话不多说,直接进入下面的分析。
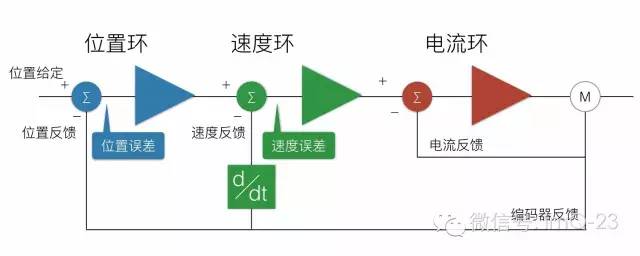
上图是目前驱动器做位置控制时的典型控制环框架图。
以旋转运动为例,在这样的控制框架中,输入侧为位置指令,当量单位为 rad;输出为电机扭矩,Nm;
在这个过程中,位置给定和位置反馈比较后成为位置误差,当量单位仍为 rad,与位置环增益相乘,计算结果给定到速度环,单位为 rad/s 也就是 1/s, 所以位置环增益的当量单位为 1/s;
但是,速度给定与速度反馈比较后的速度误差,单位也是 1/s,到最后的转矩输出 Nm 是如何转换的呢?
我们知道转矩的当量是 Nm, 也就是 力 N 和 长度 m 的乘积,而:
1 N = 1 kg m/s2
所以:
1 Nm = 1 kg m/s2 · m
也就是
1 Nm= 1 kg m2/s2
要从前面的速度单位 “1/s” 运算到这个转矩的单位 “kg m2/s2”,需要与两个当量单位做乘法:
一个是 1/s,与时间频率有关,是速度环增益的单位;
另一个是 kg m2,这个恰恰是惯量的单位,是从电流环给定到电机扭矩输出的传递系数。
速度环和位置环的增益系数都是以 1/s 为单位的频率值,这个并不难理解,因为它们反映了驱动器对于速度和位置的动态响应能力;
而后面这个电流环给定到电机扭矩输出的传递系数的单位和惯量单位是一样,都是 kg m2 ,这又是几个意思呢?
让我们从头看一下控制环的运算过程。
在位置环,将位置指令(实际上是位置误差)值求了一次导,即 d/dt 了一次,从而得出轴当前的速度指令,自然位置环增益的系数单位是 1/s 了;
在速度环,将速度指令(实际上是速度误差)值再求一次导,即又 d/dt 了一次,从而得出轴当前的加速度指令,自然速度环增益的系数单位也是 1/s 咯;
也就是说,从速度环输出给到电流环的值,其实是轴的加速度值,单位是 1/s2 ,也就是我们前文书中提到的 β。
那么,既然有了角加速度值,要给出电机的转矩输出,还记得我们前文中关于牛顿第二定律在回转运动中的表述么:
M = I β
M:转矩(Nm)
I :转动惯量(kg · m2)
β:加速度(1/s2)
这就解释了我们之前发现的那个有趣的现象了,电流环给定到电机扭矩输出的传递系数的单位和惯量单位是一样,都是 kg m2,而事实上,这个系数就是运动系统的惯量。
那么驱动器输出给电机的电流是如何计算出来的呢?
这里就要提到电机的 "电流 / 扭矩" 比了。从电机学的基本原理我们知道,对于永磁同步电机,当转速不变时,电机输入电流和输出转矩是成正比的,有一个固定的系数,这个系数是各个伺服电机自身的固有特性。所以,当驱动器运算出电机输出转矩值后,只需要将其与这个系数做个乘法,即可得出驱动器输出电流(也就是电机输入电流)了。
从这里也可以解释,为什么大部分伺服厂家通常更推荐使用自己和合作伙伴品牌的电机;以及为什么在挑选新的驱动和电机匹配时,要反复做电机特性的测试、评估,都是考虑到对伺服电机特性更精准的把握。
运控系统(主要是驱动器)在进行放大运算时,是按照上面说的顺序逐步执行的,但实际上电气人员在现场应用调试的时候,却是反过来调整各个控制环参数的。
也就是说在控制环整定时,是从内环向外环方向整定的,先是从离电机较近的电流环开始整定,然后才是速度环和位置环。如果不能有效得出系统惯量值,就无法整定出准确的速度环和位置环参数,自然也很难确保系统的动态响应性能。这个,无论是手动抑或是自适应整定,其原理也都是一样的。只是手动整定时,需要根据机械参数手动计算出惯量大小,而自适应则是控制系统借助一系列内置的自适应算法动态适配出系统惯量,但不管怎样,都得先搞定惯量值和电流环,才能进行后面的整定。
从今天的内容我们看到,像“惯量”这样一个非常“机械”的参数,对于电气驱动功能和特性的实现有多么重要;而驱动器的调试这样一个看上去如此“电气”的活儿,在现场操作时也需要机械数据的协助。
这就是设备的机电一体化。
TAG 电机选型 驱动控制
